Transformations¶
Goal¶
In this tutorial you will learn how to
- How to use makeTransformToGlobal to compute pose
- How to use makeCameraPose and Viz3d::setViewerPose
- How to visualize camera position by axes and by viewing frustum
Code¶
You can download the code from here.
#include <opencv2/viz/vizcore.hpp>
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
/**
* @function cvcloud_load
* @brief load bunny.ply
*/
Mat cvcloud_load()
{
Mat cloud(1, 1889, CV_32FC3);
ifstream ifs("bunny.ply");
string str;
for(size_t i = 0; i < 12; ++i)
getline(ifs, str);
Point3f* data = cloud.ptr<cv::Point3f>();
float dummy1, dummy2;
for(size_t i = 0; i < 1889; ++i)
ifs >> data[i].x >> data[i].y >> data[i].z >> dummy1 >> dummy2;
cloud *= 5.0f;
return cloud;
}
/**
* @function main
*/
int main(int argn, char **argv)
{
if (argn < 2)
{
cout << "Usage: " << endl << "./transformations [ G | C ]" << endl;
return 1;
}
bool camera_pov = (argv[1][0] == 'C');
/// Create a window
viz::Viz3d myWindow("Coordinate Frame");
/// Add coordinate axes
myWindow.showWidget("Coordinate Widget", viz::WCoordinateSystem());
/// Let's assume camera has the following properties
Point3f cam_pos(3.0f,3.0f,3.0f), cam_focal_point(3.0f,3.0f,2.0f), cam_y_dir(-1.0f,0.0f,0.0f);
/// We can get the pose of the cam using makeCameraPose
Affine3f cam_pose = viz::makeCameraPose(cam_pos, cam_focal_point, cam_y_dir);
/// We can get the transformation matrix from camera coordinate system to global using
/// - makeTransformToGlobal. We need the axes of the camera
Affine3f transform = viz::makeTransformToGlobal(Vec3f(0.0f,-1.0f,0.0f), Vec3f(-1.0f,0.0f,0.0f), Vec3f(0.0f,0.0f,-1.0f), cam_pos);
/// Create a cloud widget.
Mat bunny_cloud = cvcloud_load();
viz::WCloud cloud_widget(bunny_cloud, viz::Color::green());
/// Pose of the widget in camera frame
Affine3f cloud_pose = Affine3f().translate(Vec3f(0.0f,0.0f,3.0f));
/// Pose of the widget in global frame
Affine3f cloud_pose_global = transform * cloud_pose;
/// Visualize camera frame
if (!camera_pov)
{
viz::WCameraPosition cpw(0.5); // Coordinate axes
viz::WCameraPosition cpw_frustum(Vec2f(0.889484, 0.523599)); // Camera frustum
myWindow.showWidget("CPW", cpw, cam_pose);
myWindow.showWidget("CPW_FRUSTUM", cpw_frustum, cam_pose);
}
/// Visualize widget
myWindow.showWidget("bunny", cloud_widget, cloud_pose_global);
/// Set the viewer pose to that of camera
if (camera_pov)
myWindow.setViewerPose(cam_pose);
/// Start event loop.
myWindow.spin();
return 0;
}
Explanation¶
Here is the general structure of the program:
- Create a visualization window.
/// Create a window
viz::Viz3d myWindow("Transformations");
- Get camera pose from camera position, camera focal point and y direction.
/// Let's assume camera has the following properties
Point3f cam_pos(3.0f,3.0f,3.0f), cam_focal_point(3.0f,3.0f,2.0f), cam_y_dir(-1.0f,0.0f,0.0f);
/// We can get the pose of the cam using makeCameraPose
Affine3f cam_pose = viz::makeCameraPose(cam_pos, cam_focal_point, cam_y_dir);
- Obtain transform matrix knowing the axes of camera coordinate system.
/// We can get the transformation matrix from camera coordinate system to global using
/// - makeTransformToGlobal. We need the axes of the camera
Affine3f transform = viz::makeTransformToGlobal(Vec3f(0.0f,-1.0f,0.0f), Vec3f(-1.0f,0.0f,0.0f), Vec3f(0.0f,0.0f,-1.0f), cam_pos);
- Create a cloud widget from bunny.ply file
/// Create a cloud widget.
Mat bunny_cloud = cvcloud_load();
viz::WCloud cloud_widget(bunny_cloud, viz::Color::green());
- Given the pose in camera coordinate system, estimate the global pose.
/// Pose of the widget in camera frame
Affine3f cloud_pose = Affine3f().translate(Vec3f(0.0f,0.0f,3.0f));
/// Pose of the widget in global frame
Affine3f cloud_pose_global = transform * cloud_pose;
- If the view point is set to be global, visualize camera coordinate frame and viewing frustum.
/// Visualize camera frame
if (!camera_pov)
{
viz::WCameraPosition cpw(0.5); // Coordinate axes
viz::WCameraPosition cpw_frustum(Vec2f(0.889484, 0.523599)); // Camera frustum
myWindow.showWidget("CPW", cpw, cam_pose);
myWindow.showWidget("CPW_FRUSTUM", cpw_frustum, cam_pose);
}
- Visualize the cloud widget with the estimated global pose
/// Visualize widget
myWindow.showWidget("bunny", cloud_widget, cloud_pose_global);
- If the view point is set to be camera’s, set viewer pose to cam_pose.
/// Set the viewer pose to that of camera
if (camera_pov)
myWindow.setViewerPose(cam_pose);
Results¶
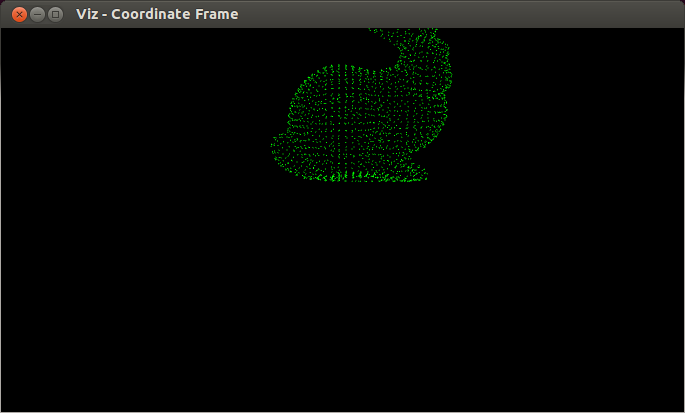
Here is the result from the camera point of view.
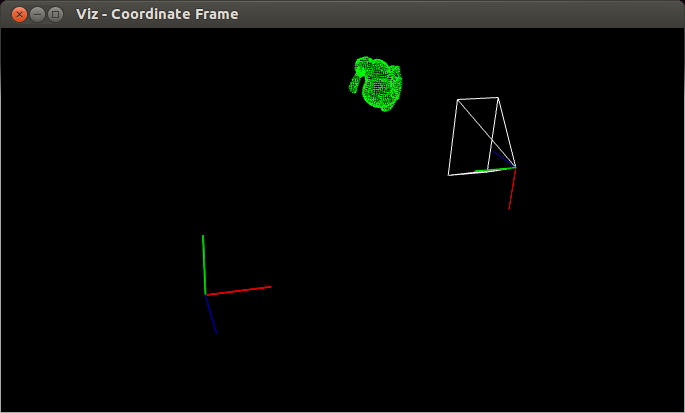
Here is the result from global point of view.
Help and Feedback
You did not find what you were looking for?- Ask a question on the Q&A forum.
- If you think something is missing or wrong in the documentation, please file a bug report.