Widget¶
In this section, the widget framework is explained. Widgets represent 2D or 3D objects, varying from simple ones such as lines to complex one such as point clouds and meshes.
Widgets are implicitly shared. Therefore, one can add a widget to the scene, and modify the widget without re-adding the widget.
...
/// Create a cloud widget
viz::WCloud cw(cloud, viz::Color::red());
/// Display it in a window
myWindow.showWidget("CloudWidget1", cw);
/// Modify it, and it will be modified in the window.
cw.setColor(viz::Color::yellow());
...
viz::Widget¶
-
class
Widget¶
Base class of all widgets. Widget is implicitly shared.
class CV_EXPORTS Widget
{
public:
Widget();
Widget(const Widget& other);
Widget& operator=(const Widget& other);
~Widget();
//! Create a widget directly from ply file
static Widget fromPlyFile(const String &file_name);
//! Rendering properties of this particular widget
void setRenderingProperty(int property, double value);
double getRenderingProperty(int property) const;
//! Casting between widgets
template<typename _W> _W cast();
private:
/* hidden */
};
viz::Widget::fromPlyFile¶
Creates a widget from ply file.
-
C++:
fromPlyFile(const String& file_name)¶ Parameters: - file_name – Ply file name.
viz::Widget::setRenderingProperty¶
Sets rendering property of the widget.
-
C++:
setRenderingProperty(int property, double value)¶ Parameters: - property – Property that will be modified.
- value – The new value of the property.
Rendering property can be one of the following:
POINT_SIZE
OPACITY
LINE_WIDTH
FONT_SIZE
- REPRESENTATION: Expected values are
- REPRESENTATION_POINTS
- REPRESENTATION_WIREFRAME
- REPRESENTATION_SURFACE
- IMMEDIATE_RENDERING:
- Turn on immediate rendering by setting the value to
1. - Turn off immediate rendering by setting the value to
0.
- Turn on immediate rendering by setting the value to
- SHADING: Expected values are
- SHADING_FLAT
- SHADING_GOURAUD
- SHADING_PHONG
viz::Widget::getRenderingProperty¶
Returns rendering property of the widget.
-
C++:
getRenderingProperty(int property)const¶ Parameters: - property – Property.
Rendering property can be one of the following:
POINT_SIZE
OPACITY
LINE_WIDTH
FONT_SIZE
- REPRESENTATION: Expected values are
- REPRESENTATION_POINTS
- REPRESENTATION_WIREFRAME
- REPRESENTATION_SURFACE
- IMMEDIATE_RENDERING:
- Turn on immediate rendering by setting the value to
1. - Turn off immediate rendering by setting the value to
0.
- Turn on immediate rendering by setting the value to
- SHADING: Expected values are
- SHADING_FLAT
- SHADING_GOURAUD
- SHADING_PHONG
viz::Widget::cast¶
Casts a widget to another.
-
C++:
cast()¶
// Create a sphere widget
viz::WSphere sw(Point3f(0.0f,0.0f,0.0f), 0.5f);
// Cast sphere widget to cloud widget
viz::WCloud cw = sw.cast<viz::WCloud>();
Note
3D Widgets can only be cast to 3D Widgets. 2D Widgets can only be cast to 2D Widgets.
viz::WidgetAccessor¶
-
class
WidgetAccessor¶
This class is for users who want to develop their own widgets using VTK library API.
struct CV_EXPORTS WidgetAccessor
{
static vtkSmartPointer<vtkProp> getProp(const Widget &widget);
static void setProp(Widget &widget, vtkSmartPointer<vtkProp> prop);
};
viz::WidgetAccessor::getProp¶
Returns vtkProp of a given widget.
-
C++:
getProp(const Widget& widget)¶ Parameters: - widget – Widget whose
vtkPropis to be returned.
- widget – Widget whose
Note
vtkProp has to be down cast appropriately to be modified.
vtkActor * actor = vtkActor::SafeDownCast(viz::WidgetAccessor::getProp(widget));
viz::WidgetAccessor::setProp¶
Sets vtkProp of a given widget.
-
C++:
setProp(Widget& widget, vtkSmartPointer<vtkProp> prop)¶ Parameters: - widget – Widget whose
vtkPropis to be set. - prop – A
vtkProp.
- widget – Widget whose
viz::Widget3D¶
-
class
Widget3D¶
Base class of all 3D widgets.
class CV_EXPORTS Widget3D : public Widget
{
public:
Widget3D() {}
//! widget position manipulation, i.e. place where it is rendered.
void setPose(const Affine3d &pose);
void updatePose(const Affine3d &pose);
Affine3d getPose() const;
//! updates internal widget data, i.e. points, normals, etc.
void applyTransform(const Affine3d &transform);
void setColor(const Color &color);
};
viz::Widget3D::setPose¶
Sets pose of the widget.
-
C++:
setPose(const Affine3d& pose)¶ Parameters: - pose – The new pose of the widget.
viz::Widget3D::updateWidgetPose¶
Updates pose of the widget by pre-multiplying its current pose.
-
C++:
updateWidgetPose(const Affine3d& pose)¶ Parameters: - pose – The pose that the current pose of the widget will be pre-multiplied by.
viz::Widget3D::getPose¶
Returns the current pose of the widget.
-
C++:
getWidgetPose()const¶
viz::Widget3D::applyTransform¶
Transforms internal widget data (i.e. points, normals) using the given transform.
-
C++:
applyTransform(const Affine3d& transform)¶ Parameters: - transform – Specified transformation to apply.
viz::Widget3D::setColor¶
Sets the color of the widget.
viz::Widget2D¶
-
class
Widget2D¶
Base class of all 2D widgets.
class CV_EXPORTS Widget2D : public Widget
{
public:
Widget2D() {}
void setColor(const Color &color);
};
viz::Widget2D::setColor¶
Sets the color of the widget.
-
C++:
setColor(const Color& color) Parameters: - color – color of type
Color
- color – color of type
viz::WLine¶
-
class
WLine¶
This 3D Widget defines a finite line.
class CV_EXPORTS WLine : public Widget3D
{
public:
WLine(const Point3f &pt1, const Point3f &pt2, const Color &color = Color::white());
};
viz::WLine::WLine¶
Constructs a WLine.
viz::WPlane¶
-
class
WPlane¶
This 3D Widget defines a finite plane.
class CV_EXPORTS WPlane : public Widget3D
{
public:
//! created default plane with center point at origin and normal oriented along z-axis
WPlane(const Size2d& size = Size2d(1.0, 1.0), const Color &color = Color::white());
//! repositioned plane
WPlane(const Point3d& center, const Vec3d& normal, const Vec3d& new_plane_yaxis,const Size2d& size = Size2d(1.0, 1.0), const Color &color = Color::white());
};
viz::WPlane::WPlane¶
Constructs a default plane with center point at origin and normal oriented along z-axis.
viz::WPlane::WPlane¶
Constructs a repositioned plane
-
C++:
WPlane(const Point3d& center, const Vec3d& normal, const Vec3d& new_yaxis, const Size2d& size=Size2d(1.0, 1.0), const Color& color=Color::white())¶ Parameters: - center – Center of the plane
- normal – Plane normal orientation
- new_yaxis – Up-vector. New orientation of plane y-axis.
- color –
Colorof the plane.
viz::WSphere¶
-
class
WSphere¶
This 3D Widget defines a sphere.
class CV_EXPORTS WSphere : public Widget3D
{
public:
WSphere(const cv::Point3f ¢er, double radius, int sphere_resolution = 10, const Color &color = Color::white())
};
viz::WSphere::WSphere¶
Constructs a WSphere.
viz::WArrow¶
-
class
WArrow¶
This 3D Widget defines an arrow.
class CV_EXPORTS WArrow : public Widget3D
{
public:
WArrow(const Point3f& pt1, const Point3f& pt2, double thickness = 0.03, const Color &color = Color::white());
};
viz::WArrow::WArrow¶
Constructs an WArrow.
-
C++:
WArrow(const Point3f& pt1, const Point3f& pt2, double thickness=0.03, const Color& color=Color::white())¶ Parameters: - pt1 – Start point of the arrow.
- pt2 – End point of the arrow.
- thickness – Thickness of the arrow. Thickness of arrow head is also adjusted accordingly.
- color –
Colorof the arrow.
Arrow head is located at the end point of the arrow.
viz::WCircle¶
-
class
WCircle¶
This 3D Widget defines a circle.
class CV_EXPORTS WCircle : public Widget3D
{
public:
//! creates default planar circle centred at origin with plane normal along z-axis
WCircle(double radius, double thickness = 0.01, const Color &color = Color::white());
//! creates repositioned circle
WCircle(double radius, const Point3d& center, const Vec3d& normal, double thickness = 0.01, const Color &color = Color::white());
};
viz::WCircle::WCircle¶
Constructs default planar circle centred at origin with plane normal along z-axis
viz::WCircle::WCircle¶
Constructs repositioned planar circle.
-
C++:
WCircle(double radius, const Point3d& center, const Vec3d& normal, double thickness=0.01, const Color& color=Color::white())¶ Parameters: - radius – Radius of the circle.
- center – Center of the circle.
- normal – Normal of the plane in which the circle lies.
- thickness – Thickness of the circle.
- color –
Colorof the circle.
viz::WCone¶
-
class
WCone¶
This 3D Widget defines a cone.
class CV_EXPORTS WCone : public Widget3D
{
public:
//! create default cone, oriented along x-axis with center of its base located at origin
WCone(double length, double radius, int resolution = 6.0, const Color &color = Color::white());
//! creates repositioned cone
WCone(double radius, const Point3d& center, const Point3d& tip, int resolution = 6.0, const Color &color = Color::white());
};
viz::WCone::WCone¶
Constructs default cone oriented along x-axis with center of its base located at origin
viz::WCone::WCone¶
Constructs repositioned planar cone.
viz::WCylinder¶
-
class
WCylinder¶
This 3D Widget defines a cylinder.
class CV_EXPORTS WCylinder : public Widget3D
{
public:
WCylinder(const Point3d& axis_point1, const Point3d& axis_point2, double radius, int numsides = 30, const Color &color = Color::white());
};
viz::WCylinder::WCylinder¶
Constructs a WCylinder.
-
C++:
WCylinder(const Point3f& pt_on_axis, const Point3f& axis_direction, double radius, int numsides=30, const Color& color=Color::white())¶ Parameters: - axis_point1 – A point1 on the axis of the cylinder.
- axis_point2 – A point2 on the axis of the cylinder.
- radius – Radius of the cylinder.
- numsides – Resolution of the cylinder.
- color –
Colorof the cylinder.
viz::WCube¶
-
class
WCube¶
This 3D Widget defines a cube.
class CV_EXPORTS WCube : public Widget3D
{
public:
WCube(const Point3f& pt_min, const Point3f& pt_max, bool wire_frame = true, const Color &color = Color::white());
};
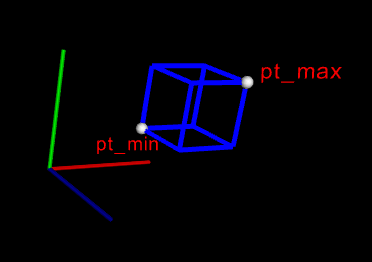
viz::WCube::WCube¶
Constructs a WCube.
-
C++:
WCube(const Point3f& pt_min, const Point3f& pt_max, bool wire_frame=true, const Color& color=Color::white())¶ Parameters: - pt_min – Specifies minimum point of the bounding box.
- pt_max – Specifies maximum point of the bounding box.
- wire_frame – If true, cube is represented as wireframe.
- color –
Colorof the cube.
viz::WCoordinateSystem¶
-
class
WCoordinateSystem¶
This 3D Widget represents a coordinate system.
class CV_EXPORTS WCoordinateSystem : public Widget3D
{
public:
WCoordinateSystem(double scale = 1.0);
};
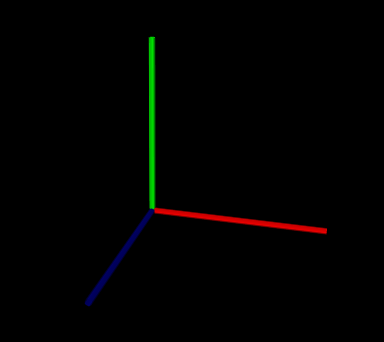
viz::WCoordinateSystem::WCoordinateSystem¶
Constructs a WCoordinateSystem.
-
C++:
WCoordinateSystem(double scale=1.0)¶ Parameters: - scale – Determines the size of the axes.
viz::WPolyLine¶
-
class
WPolyLine¶
This 3D Widget defines a poly line.
class CV_EXPORTS WPolyLine : public Widget3D
{
public:
WPolyLine(InputArray points, const Color &color = Color::white());
};
viz::WPolyLine::WPolyLine¶
Constructs a WPolyLine.
viz::WGrid¶
-
class
WGrid¶
This 3D Widget defines a grid.
class CV_EXPORTS WGrid : public Widget3D
{
public:
//! Creates grid at the origin and normal oriented along z-axis
WGrid(const Vec2i &cells = Vec2i::all(10), const Vec2d &cells_spacing = Vec2d::all(1.0), const Color &color = Color::white());
//! Creates repositioned grid
WGrid(const Point3d& center, const Vec3d& normal, const Vec3d& new_yaxis,
const Vec2i &cells = Vec2i::all(10), const Vec2d &cells_spacing = Vec2d::all(1.0), const Color &color = Color::white());
};
viz::WGrid::WGrid¶
Constructs a WGrid.
viz::WText3D¶
-
class
WText3D¶
This 3D Widget represents 3D text. The text always faces the camera.
class CV_EXPORTS WText3D : public Widget3D
{
public:
WText3D(const String &text, const Point3f &position, double text_scale = 1.0, bool face_camera = true, const Color &color = Color::white());
void setText(const String &text);
String getText() const;
};
viz::WText3D::WText3D¶
Constructs a WText3D.
-
C++:
WText3D(const String& text, const Point3f& position, double text_scale=1.0, bool face_camera=true, const Color& color=Color::white())¶ Parameters: - text – Text content of the widget.
- position – Position of the text.
- text_scale – Size of the text.
- face_camera – If true, text always faces the camera.
- color –
Colorof the text.
viz::WText3D::setText¶
Sets the text content of the widget.
-
C++:
setText(const String& text)¶ Parameters: - text – Text content of the widget.
viz::WText¶
-
class
WText¶
This 2D Widget represents text overlay.
class CV_EXPORTS WText : public Widget2D
{
public:
WText(const String &text, const Point2i &pos, int font_size = 10, const Color &color = Color::white());
void setText(const String &text);
String getText() const;
};
viz::WText::WText¶
Constructs a WText.
viz::WText::setText¶
Sets the text content of the widget.
-
C++:
setText(const String& text) Parameters: - text – Text content of the widget.
viz::WImageOverlay¶
-
class
WImageOverlay¶
This 2D Widget represents an image overlay.
class CV_EXPORTS WImageOverlay : public Widget2D
{
public:
WImageOverlay(InputArray image, const Rect &rect);
void setImage(InputArray image);
};
viz::WImageOverlay::WImageOverlay¶
Constructs an WImageOverlay.
-
C++:
WImageOverlay(InputArray image, const Rect& rect)¶ Parameters: - image – BGR or Gray-Scale image.
- rect – Image is scaled and positioned based on rect.
viz::WImageOverlay::setImage¶
Sets the image content of the widget.
-
C++:
setImage(InputArray image)¶ Parameters: - image – BGR or Gray-Scale image.
viz::WImage3D¶
-
class
WImage3D¶
This 3D Widget represents an image in 3D space.
class CV_EXPORTS WImage3D : public Widget3D
{
public:
//! Creates 3D image at the origin
WImage3D(InputArray image, const Size2d &size);
//! Creates 3D image at a given position, pointing in the direction of the normal, and having the up_vector orientation
WImage3D(InputArray image, const Size2d &size, const Vec3d &position, const Vec3d &normal, const Vec3d &up_vector);
void setImage(InputArray image);
};
viz::WImage3D::WImage3D¶
Constructs an WImage3D.
-
C++:
WImage3D(InputArray image, const Size2d& size)¶ Parameters: - image – BGR or Gray-Scale image.
- size – Size of the image.
-
C++:
WImage3D(InputArray image, const Size2d& size, const Vec3d& position, const Vec3d& normal, const Vec3d& up_vector)¶ Parameters: - position – Position of the image.
- normal – Normal of the plane that represents the image.
- up_vector – Determines orientation of the image.
- image – BGR or Gray-Scale image.
- size – Size of the image.
viz::WImage3D::setImage¶
Sets the image content of the widget.
-
C++:
setImage(InputArray image) Parameters: - image – BGR or Gray-Scale image.
viz::WCameraPosition¶
-
class
WCameraPosition¶
This 3D Widget represents camera position in a scene by its axes or viewing frustum.
class CV_EXPORTS WCameraPosition : public Widget3D
{
public:
//! Creates camera coordinate frame (axes) at the origin
WCameraPosition(double scale = 1.0);
//! Creates frustum based on the intrinsic marix K at the origin
WCameraPosition(const Matx33d &K, double scale = 1.0, const Color &color = Color::white());
//! Creates frustum based on the field of view at the origin
WCameraPosition(const Vec2d &fov, double scale = 1.0, const Color &color = Color::white());
//! Creates frustum and display given image at the far plane
WCameraPosition(const Matx33d &K, InputArray image, double scale = 1.0, const Color &color = Color::white());
//! Creates frustum and display given image at the far plane
WCameraPosition(const Vec2d &fov, InputArray image, double scale = 1.0, const Color &color = Color::white());
};
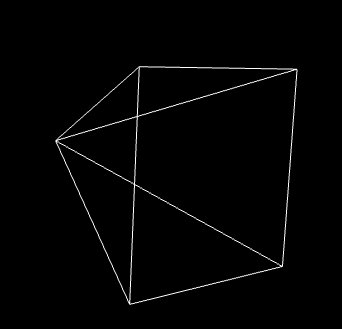
viz::WCameraPosition::WCameraPosition¶
Constructs a WCameraPosition.
Display camera coordinate frame.
-
C++:
WCameraPosition(double scale=1.0)¶ Creates camera coordinate frame at the origin.
-
C++:
Display the viewing frustum.
-
C++:
WCameraPosition(const Matx33d& K, double scale=1.0, const Color& color=Color::white())¶ Parameters: - K – Intrinsic matrix of the camera.
- scale – Scale of the frustum.
- color –
Colorof the frustum.
Creates viewing frustum of the camera based on its intrinsic matrix K.
-
C++:
WCameraPosition(const Vec2d& fov, double scale=1.0, const Color& color=Color::white())¶ Parameters: - fov – Field of view of the camera (horizontal, vertical).
- scale – Scale of the frustum.
- color –
Colorof the frustum.
Creates viewing frustum of the camera based on its field of view fov.
-
C++:
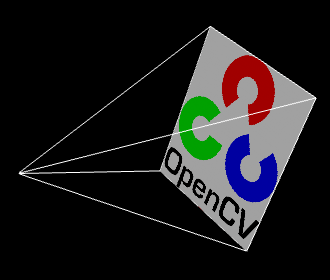
Display image on the far plane of the viewing frustum.
-
C++:
WCameraPosition(const Matx33d& K, InputArray image, double scale=1.0, const Color& color=Color::white())¶ Parameters: - K – Intrinsic matrix of the camera.
- img – BGR or Gray-Scale image that is going to be displayed on the far plane of the frustum.
- scale – Scale of the frustum and image.
- color –
Colorof the frustum.
Creates viewing frustum of the camera based on its intrinsic matrix K, and displays image on the far end plane.
-
C++:
WCameraPosition(const Vec2d& fov, InputArray image, double scale=1.0, const Color& color=Color::white())¶ Parameters: - fov – Field of view of the camera (horizontal, vertical).
- img – BGR or Gray-Scale image that is going to be displayed on the far plane of the frustum.
- scale – Scale of the frustum and image.
- color –
Colorof the frustum.
Creates viewing frustum of the camera based on its intrinsic matrix K, and displays image on the far end plane.
-
C++:
viz::WTrajectory¶
-
class
WTrajectory¶
This 3D Widget represents a trajectory.
class CV_EXPORTS WTrajectory : public Widget3D
{
public:
enum {FRAMES = 1, PATH = 2, BOTH = FRAMES + PATH};
//! Displays trajectory of the given path either by coordinate frames or polyline
WTrajectory(InputArray path, int display_mode = WTrajectory::PATH, double scale = 1.0, const Color &color = Color::white(),;
};
viz::WTrajectory::WTrajectory¶
Constructs a WTrajectory.
-
C++:
WTrajectory(InputArray path, int display_mode=WTrajectory::PATH, double scale=1.0, const Color& color=Color::white())¶ Parameters: - path – List of poses on a trajectory. Takes std::vector<Affine<T>> with T == [float | double]
- display_mode – Display mode. This can be PATH, FRAMES, and BOTH.
- scale – Scale of the frames. Polyline is not affected.
- color –
Colorof the polyline that represents path. Frames are not affected.
Displays trajectory of the given path as follows:
- PATH : Displays a poly line that represents the path.
- FRAMES : Displays coordinate frames at each pose.
- PATH & FRAMES : Displays both poly line and coordinate frames.
viz::WTrajectoryFrustums¶
-
class
WTrajectoryFrustums¶
This 3D Widget represents a trajectory.
class CV_EXPORTS WTrajectoryFrustums : public Widget3D
{
public:
//! Displays trajectory of the given path by frustums
WTrajectoryFrustums(InputArray path, const Matx33d &K, double scale = 1.0, const Color &color = Color::white());
//! Displays trajectory of the given path by frustums
WTrajectoryFrustums(InputArray path, const Vec2d &fov, double scale = 1.0, const Color &color = Color::white());
};
viz::WTrajectoryFrustums::WTrajectoryFrustums¶
Constructs a WTrajectoryFrustums.
-
C++:
WTrajectoryFrustums(const std::vector<Affine3d>& path, const Matx33d& K, double scale=1.0, const Color& color=Color::white())¶ Parameters: - path – List of poses on a trajectory. Takes std::vector<Affine<T>> with T == [float | double]
- K – Intrinsic matrix of the camera.
- scale – Scale of the frustums.
- color –
Colorof the frustums.
Displays frustums at each pose of the trajectory.
-
C++:
WTrajectoryFrustums(const std::vector<Affine3d>& path, const Vec2d& fov, double scale=1.0, const Color& color=Color::white())¶ Parameters: - path – List of poses on a trajectory. Takes std::vector<Affine<T>> with T == [float | double]
- fov – Field of view of the camera (horizontal, vertical).
- scale – Scale of the frustums.
- color –
Colorof the frustums.
Displays frustums at each pose of the trajectory.
viz::WTrajectorySpheres¶
-
class
WTrajectorySpheres¶
This 3D Widget represents a trajectory using spheres and lines, where spheres represent the positions of the camera, and lines represent the direction from previous position to the current.
class CV_EXPORTS WTrajectorySpheres : public Widget3D
{
public:
WTrajectorySpheres(InputArray path, double line_length = 0.05, double radius = 0.007,
const Color &from = Color::red(), const Color &to = Color::white());
};
viz::WTrajectorySpheres::WTrajectorySpheres¶
Constructs a WTrajectorySpheres.
-
C++:
WTrajectorySpheres(InputArray path, double line_length=0.05, double radius=0.007, const Color& from=Color::red(), const Color& to=Color::white())¶ Parameters: - path – List of poses on a trajectory. Takes std::vector<Affine<T>> with T == [float | double]
- line_length – Max length of the lines which point to previous position
- sphere_radius – Radius of the spheres.
- from –
Colorfor first sphere. - to –
Colorfor last sphere. Intermediate spheres will have interpolated color.
viz::WCloud¶
-
class
WCloud¶
This 3D Widget defines a point cloud.
class CV_EXPORTS WCloud : public Widget3D
{
public:
//! Each point in cloud is mapped to a color in colors
WCloud(InputArray cloud, InputArray colors);
//! All points in cloud have the same color
WCloud(InputArray cloud, const Color &color = Color::white());
//! Each point in cloud is mapped to a color in colors, normals are used for shading
WCloud(InputArray cloud, InputArray colors, InputArray normals);
//! All points in cloud have the same color, normals are used for shading
WCloud(InputArray cloud, const Color &color, InputArray normals);
};
viz::WCloud::WCloud¶
Constructs a WCloud.
-
C++:
WCloud(InputArray cloud, InputArray colors)¶ Parameters: - cloud – Set of points which can be of type:
CV_32FC3,CV_32FC4,CV_64FC3,CV_64FC4. - colors – Set of colors. It has to be of the same size with cloud.
Points in the cloud belong to mask when they are set to (NaN, NaN, NaN).
- cloud – Set of points which can be of type:
-
C++:
WCloud(InputArray cloud, const Color& color=Color::white())¶ Parameters: - cloud – Set of points which can be of type:
CV_32FC3,CV_32FC4,CV_64FC3,CV_64FC4. - color – A single
Colorfor the whole cloud.
Points in the cloud belong to mask when they are set to (NaN, NaN, NaN).
- cloud – Set of points which can be of type:
-
C++:
WCloud(InputArray cloud, InputArray colors, InputArray normals)¶ Parameters: - cloud – Set of points which can be of type:
CV_32FC3,CV_32FC4,CV_64FC3,CV_64FC4. - colors – Set of colors. It has to be of the same size with cloud.
- normals – Normals for each point in cloud. Size and type should match with the cloud parameter.
Points in the cloud belong to mask when they are set to (NaN, NaN, NaN).
- cloud – Set of points which can be of type:
-
C++:
WCloud(InputArray cloud, const Color& color, InputArray normals)¶ Parameters: - cloud – Set of points which can be of type:
CV_32FC3,CV_32FC4,CV_64FC3,CV_64FC4. - color – A single
Colorfor the whole cloud. - normals – Normals for each point in cloud. Size and type should match with the cloud parameter.
Points in the cloud belong to mask when they are set to (NaN, NaN, NaN).
- cloud – Set of points which can be of type:
Note
In case there are four channels in the cloud, fourth channel is ignored.
viz::WCloudCollection¶
-
class
WCloudCollection¶
This 3D Widget defines a collection of clouds.
class CV_EXPORTS WCloudCollection : public Widget3D
{
public:
WCloudCollection();
//! Each point in cloud is mapped to a color in colors
void addCloud(InputArray cloud, InputArray colors, const Affine3d &pose = Affine3d::Identity());
//! All points in cloud have the same color
void addCloud(InputArray cloud, const Color &color = Color::white(), Affine3d &pose = Affine3d::Identity());
//! Repacks internal structure to single cloud
void finalize();
};
viz::WCloudCollection::addCloud¶
Adds a cloud to the collection.
-
C++:
addCloud(InputArray cloud, InputArray colors, const Affine3d& pose=Affine3d::Identity())¶ Parameters: - cloud – Point set which can be of type:
CV_32FC3,CV_32FC4,CV_64FC3,CV_64FC4. - colors – Set of colors. It has to be of the same size with cloud.
- pose – Pose of the cloud.
Points in the cloud belong to mask when they are set to (NaN, NaN, NaN).
- cloud – Point set which can be of type:
-
C++:
addCloud(InputArray cloud, const Color& color=Color::white(), const Affine3d& pose=Affine3d::Identity())¶ Parameters: - cloud – Point set which can be of type:
CV_32FC3,CV_32FC4,CV_64FC3,CV_64FC4. - colors – A single
Colorfor the whole cloud. - pose – Pose of the cloud.
Points in the cloud belong to mask when they are set to (NaN, NaN, NaN).
- cloud – Point set which can be of type:
Note
In case there are four channels in the cloud, fourth channel is ignored.
viz::WCloudCollection::finalize¶
Finalizes cloud data by repacking to single cloud. Useful for large cloud collections to reduce memory usage
-
C++:
finalize()¶
viz::WCloudNormals¶
-
class
WCloudNormals¶
This 3D Widget represents normals of a point cloud.
class CV_EXPORTS WCloudNormals : public Widget3D
{
public:
WCloudNormals(InputArray cloud, InputArray normals, int level = 100, double scale = 0.02f, const Color &color = Color::white());
};
viz::WCloudNormals::WCloudNormals¶
Constructs a WCloudNormals.
-
C++:
WCloudNormals(InputArray cloud, InputArray normals, int level=100, double scale=0.02f, const Color& color=Color::white())¶ Parameters: - cloud – Point set which can be of type:
CV_32FC3,CV_32FC4,CV_64FC3,CV_64FC4. - normals – A set of normals that has to be of same type with cloud.
- level – Display only every
levelth normal. - scale – Scale of the arrows that represent normals.
- color –
Colorof the arrows that represent normals.
- cloud – Point set which can be of type:
Note
In case there are four channels in the cloud, fourth channel is ignored.
viz::WMesh¶
-
class
WMesh¶
This 3D Widget defines a mesh.
class CV_EXPORTS WMesh : public Widget3D
{
public:
WMesh(const Mesh &mesh);
WMesh(InputArray cloud, InputArray polygons, InputArray colors = noArray(), InputArray normals = noArray());
};
viz::WMesh::WMesh¶
Constructs a WMesh.
-
C++:
WMesh(InputArray cloud, InputArray polygons, InputArray colors=noArray(), InputArray normals=noArray())¶ Parameters: - cloud – Points of the mesh object.
- polygons – Points of the mesh object.
- colors – Point colors.
- normals – Point normals.
viz::WWidgetMerger¶
-
class
WWidgetMerger¶
This class allows to merge several widgets to single one. It has quite limited functionality and can’t merge widgets with different attributes. For instance, if widgetA has color array and widgetB has only global color defined, then result of merge won’t have color at all. The class is suitable for merging large amount of similar widgets.
class CV_EXPORTS WWidgetMerger : public Widget3D
{
public:
WWidgetMerger();
//! Add widget to merge with optional position change
void addWidget(const Widget3D& widget, const Affine3d &pose = Affine3d::Identity());
//! Repacks internal structure to single widget
void finalize();
};
viz::WWidgetMerger::addCloud¶
Adds a cloud to the collection.
-
C++:
addWidget(const Widget3D& widget, const Affine3d& pose=Affine3d::Identity())¶ Parameters: - widget – Widget to merge.
- pose – Pose of the widget.
viz::WWidgetMerger::finalize¶
Finalizes merger data and constructs final merged widget
-
C++:
finalize()
Help and Feedback
You did not find what you were looking for?- Ask a question on the Q&A forum.
- If you think something is missing or wrong in the documentation, please file a bug report.
![]()
Table Of Contents
- Widget
- viz::Widget
- viz::Widget::fromPlyFile
- viz::Widget::setRenderingProperty
- viz::Widget::getRenderingProperty
- viz::Widget::cast
- viz::WidgetAccessor
- viz::WidgetAccessor::getProp
- viz::WidgetAccessor::setProp
- viz::Widget3D
- viz::Widget3D::setPose
- viz::Widget3D::updateWidgetPose
- viz::Widget3D::getPose
- viz::Widget3D::applyTransform
- viz::Widget3D::setColor
- viz::Widget2D
- viz::Widget2D::setColor
- viz::WLine
- viz::WLine::WLine
- viz::WPlane
- viz::WPlane::WPlane
- viz::WPlane::WPlane
- viz::WSphere
- viz::WSphere::WSphere
- viz::WArrow
- viz::WArrow::WArrow
- viz::WCircle
- viz::WCircle::WCircle
- viz::WCircle::WCircle
- viz::WCone
- viz::WCone::WCone
- viz::WCone::WCone
- viz::WCylinder
- viz::WCylinder::WCylinder
- viz::WCube
- viz::WCube::WCube
- viz::WCoordinateSystem
- viz::WCoordinateSystem::WCoordinateSystem
- viz::WPolyLine
- viz::WPolyLine::WPolyLine
- viz::WGrid
- viz::WGrid::WGrid
- viz::WText3D
- viz::WText3D::WText3D
- viz::WText3D::setText
- viz::WText3D::getText
- viz::WText
- viz::WText::WText
- viz::WText::setText
- viz::WText::getText
- viz::WImageOverlay
- viz::WImageOverlay::WImageOverlay
- viz::WImageOverlay::setImage
- viz::WImage3D
- viz::WImage3D::WImage3D
- viz::WImage3D::setImage
- viz::WCameraPosition
- viz::WCameraPosition::WCameraPosition
- viz::WTrajectory
- viz::WTrajectory::WTrajectory
- viz::WTrajectoryFrustums
- viz::WTrajectoryFrustums::WTrajectoryFrustums
- viz::WTrajectorySpheres
- viz::WTrajectorySpheres::WTrajectorySpheres
- viz::WCloud
- viz::WCloud::WCloud
- viz::WCloudCollection
- viz::WCloudCollection::WCloudCollection
- viz::WCloudCollection::addCloud
- viz::WCloudCollection::finalize
- viz::WCloudNormals
- viz::WCloudNormals::WCloudNormals
- viz::WMesh
- viz::WMesh::WMesh
- viz::WWidgetMerger
- viz::WWidgetMerger::WWidgetMerger
- viz::WWidgetMerger::addCloud
- viz::WWidgetMerger::finalize