Relative Joint 2D
Switch to ScriptingThis joint component allows two game objects controlled by rigidbody physics to maintain in a position based on each other’s location. Use this joint to keep two objects offset from each other, at a position and angle you decide.
See Details below for more information about the differences between RelativeJoint2D and FixedJoint2D.
| Property: | Function: |
|---|---|
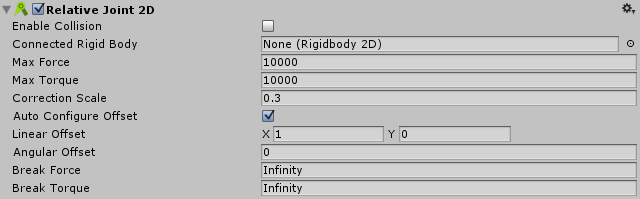
| Enable Collision | Can the two connected objects collide with each other? Check the box for yes. |
| Connected Rigid Body | Specify here the other object this joint connects to. Leave this as None and the other end of the joint will be fixed at a point in space. Select the circle to the right of the field to view a list of objects to connect to. |
| Max Force | Sets the linear (straight line) offset between joined objects - a high value (of up to 1,000) uses high force to maintain the offset. |
| Max Torque | Sets the angular (rotation) movement between joined objects - a high value (of up to 1,000) uses high force to maintain the offset. |
| Correction Scale | Tweaks the joint to make sure it behaves as required. (Increasing the Max Force or Max Torque may affect behaviour so that the joint doesn’t reach its target, use this setting to correct it.) The default setting of 0.3 is usually appropriate but it may need tweaking between the range of 0 and 1. |
| Auto Configure Offset | Check this box to automatically set and maintain the distance and angle between the connected objects. (Selecting this option means you don’t need to manually enter the Linear Offset and Angular Offset.) |
| Linear Offset | Enter local space co-ordinates to specify and maintain the distance between the connected objects. |
| Angular Offset | Enter local space co-ordinates to specify and maintain the angle between the connected objects. |
| Break Force | Specify the force level needed to break and so delete the joint. Infinity means it is unbreakable. |
| Break Torque | Specify the torque level needed to break and so delete the joint. Infinity means it is unbreakable. |
Details
(See also Joints 2D: Details and Hints for useful background information on all 2D joints.)
The aim of this joint is to maintain a relative linear and angular distance (offset) between two points. Those two points can be two Rigidbody2D components or a Rigidbody2D component and a fixed position in the world. (Connect to a fixed position in the world by setting Connected Rigidbody to None).
The joint applies a linear and angular (torque) force to both connected rigid body objects. It uses a simulated motor that is pre-configured to be quite powerful: It has a high Max Force and Max Torque limit. You can lower these values to make the motor less powerful motor or turn-off it off completely.
This joint has two simultaneous constraints:
- Maintain the specified linear offset between the two rigid body objects.
- Maintain the starting angular offset between the two rigid body objects.
For Example:
You can use this joint to construct physical objects that need to:
- Keep a distance apart from each other, as if they are unable to move further away from each other or closer together. (You decide the distance they are apart from each other. The distance can change in real-time.)
- Rotate with respect to each other only at particular angle. (You decide the angle.)
Some uses may need the connection to be flexible, such as: A space-shooter game where the player has extra gun batteries that follow them. You can use the Relative Joint to give the trailing gun batteries a slight lag when they follow, but make them rotate with the player with no lag.
Some uses may need a configurable force, such as: A game where the the camera follows a player using a configurable force to keep track.
Fixed vs. Relative Joint
FixedJoint2D is spring type joint. RelativeJoint2D is a motor type joint with a maximum force and/or torque.
- The Fixed Joint uses a spring to maintain the relative linear and angular offsets and the Relative joint uses a motor. You can configure a joint’s spring or motor.
- The Fixed joint works with anchor points (it’s derived from script AnchoredJoint2D): It maintains the relative linear and angular offset between the anchors. The Relative joint doesn’t have anchor points (it’s derived directly from script Joint2D).
- The Relative joint can modify the relative linear and angular offsets in real time: The Fixed joint cannot.