|
TrinityCore
|
|
TrinityCore
|
#include <LineSegment.h>
Public Member Functions | |
| LineSegment () | |
| LineSegment (class BinaryInput &b) | |
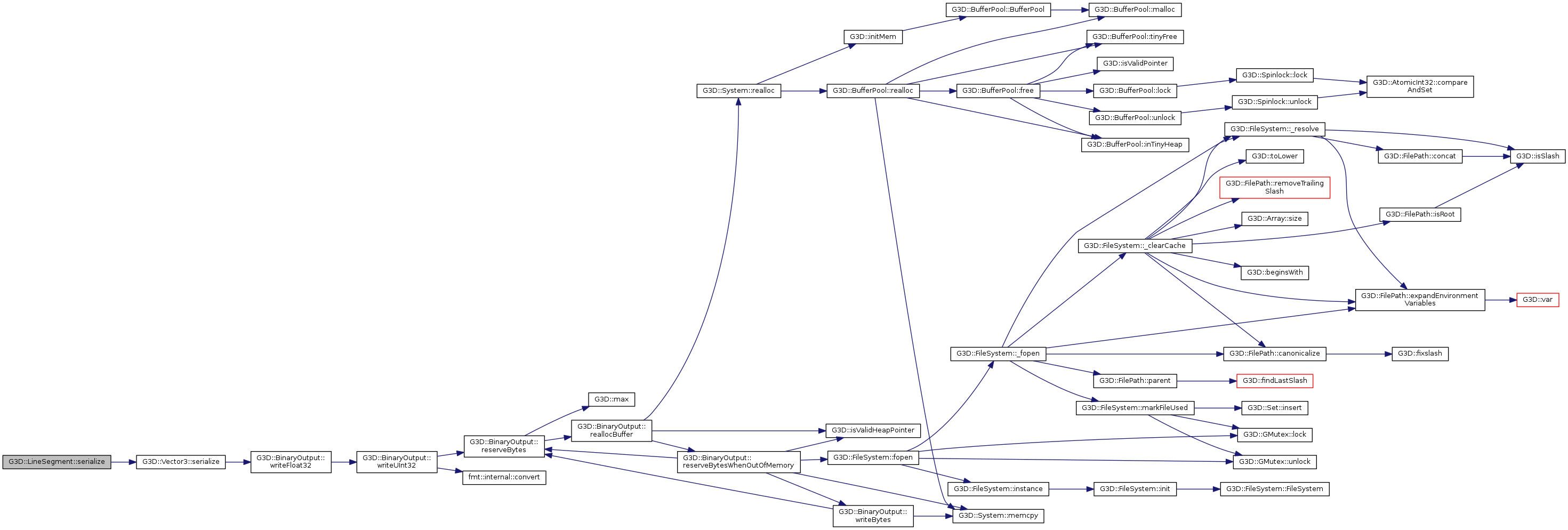
| void | serialize (class BinaryOutput &b) const |
| void | deserialize (class BinaryInput &b) |
| virtual | ~LineSegment () |
| Point3 | point (int i) const |
| Point3 | midpoint () const |
| float | length () const |
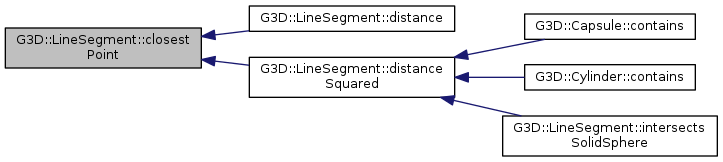
| Point3 | closestPoint (const Point3 &point) const |
| double | distance (const Point3 &p) const |
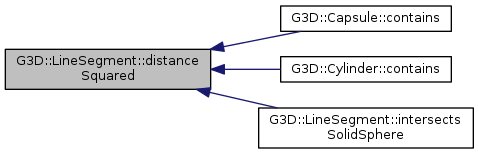
| double | distanceSquared (const Point3 &p) const |
| bool | intersectsSolidSphere (const class Sphere &s) const |
| Point3 | randomPoint () const |
Static Public Member Functions | |
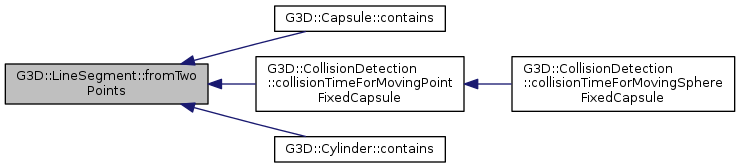
| static LineSegment | fromTwoPoints (const Point3 &point1, const Point3 &point2) |
Protected Member Functions | |
| LineSegment (const Point3 &__point, const Vector3 &_direction) | |
Protected Attributes | |
| Point3 | _point |
| Vector3 | direction |
An finite segment of an infinite 3D line.
|
inlineprotected |
|
inline |
 Here is the caller graph for this function:
Here is the caller graph for this function:| G3D::LineSegment::LineSegment | ( | class BinaryInput & | b | ) |
Here is the call graph for this function:Returns the closest point on the line segment to point.
Here is the call graph for this function: Here is the caller graph for this function:| void G3D::LineSegment::deserialize | ( | class BinaryInput & | b | ) |
Here is the call graph for this function: Here is the caller graph for this function:Returns the distance between point and the line
Here is the call graph for this function: Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Constructs a line from two (not equal) points.
Here is the call graph for this function: Here is the caller graph for this function:Returns true if some part of this segment is inside the sphere
Here is the call graph for this function:
|
inline |
Here is the call graph for this function:
|
inline |
| Vector3 G3D::LineSegment::point | ( | int | i | ) | const |
Call with 0 or 1
| Vector3 G3D::LineSegment::randomPoint | ( | ) | const |
Here is the call graph for this function:| void G3D::LineSegment::serialize | ( | class BinaryOutput & | b | ) | const |
Here is the call graph for this function:
|
protected |
|
protected |
Not normalized
 1.8.8
1.8.8