|
TrinityCore
|
|
TrinityCore
|
#include <Plane.h>
Static Public Member Functions | |
| static Plane | fromEquation (float a, float b, float c, float d) |
Private Member Functions | |
| Plane (const Vector3 &n, float d) | |
Private Attributes | |
| Vector3 | _normal |
| float | _distance |
An infinite 2D plane in 3D space.
Assumes the normal has unit length.
|
inline |
 Here is the caller graph for this function:
Here is the caller graph for this function:Constructs a plane from three points.
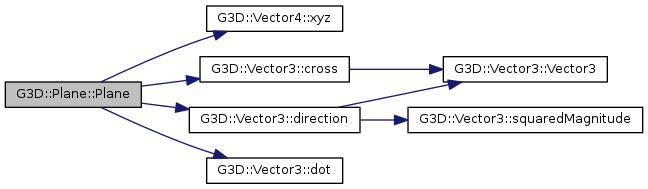
Here is the call graph for this function:Constructs a plane from three points, where at most two are at infinity (w = 0, not xyz = inf).
Here is the call graph for this function:The normal will be unitized.
Here is the call graph for this function:| G3D::Plane::Plane | ( | class BinaryInput & | b | ) |
Here is the call graph for this function:
|
inline |
Returns normal * distance from origin
Here is the call graph for this function: Here is the caller graph for this function:| void G3D::Plane::deserialize | ( | class BinaryInput & | b | ) |
Here is the call graph for this function: Here is the caller graph for this function:Returns distance from point to plane. Distance is negative if point is behind (not in plane in direction opposite normal) the plane.
Here is the call graph for this function: Here is the caller graph for this function:| void G3D::Plane::flip | ( | ) |
Inverts the facing direction of the plane so the new normal is the inverse of the old normal.
|
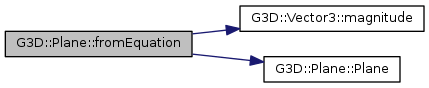
static |
Here is the call graph for this function:Returns true if the point is nearly in the plane.
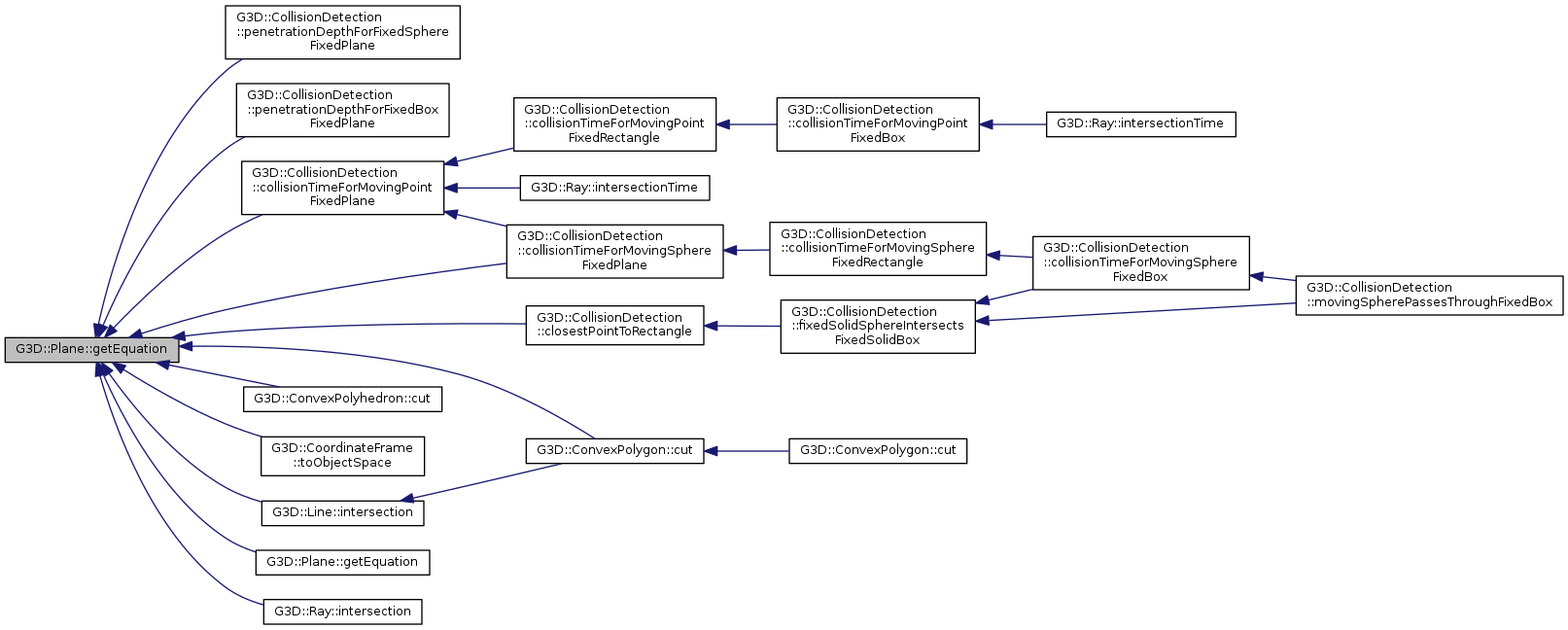
Here is the call graph for this function: Here is the caller graph for this function:| void G3D::Plane::getEquation | ( | Vector3 & | normal, |
| double & | d | ||
| ) | const |
Returns the equation in the form:
normal.Dot(Vector3(x, y, z)) + d = 0
Here is the caller graph for this function:| void G3D::Plane::getEquation | ( | Vector3 & | normal, |
| float & | d | ||
| ) | const |
Here is the call graph for this function:| void G3D::Plane::getEquation | ( | double & | a, |
| double & | b, | ||
| double & | c, | ||
| double & | d | ||
| ) | const |
ax + by + cz + d = 0
| void G3D::Plane::getEquation | ( | float & | a, |
| float & | b, | ||
| float & | c, | ||
| float & | d | ||
| ) | const |
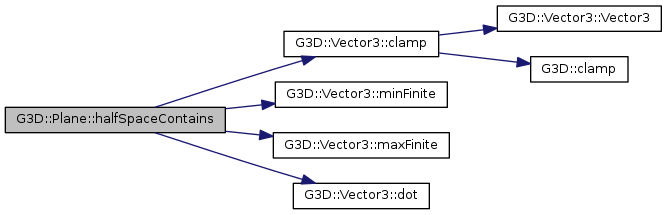
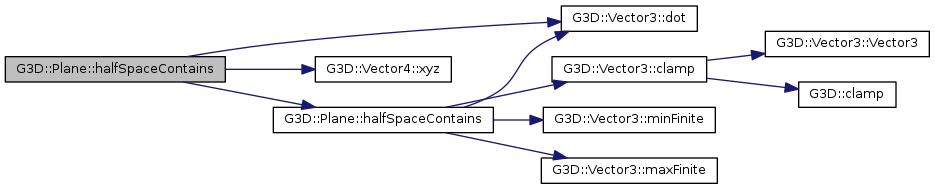
Here is the call graph for this function:Returns true if point is on the side the normal points to or is in the plane.
Here is the call graph for this function: Here is the caller graph for this function:Returns true if point is on the side the normal points to or is in the plane.
Here is the call graph for this function:Returns true if point is on the side the normal points to or is in the plane. Only call on finite points. Faster than halfSpaceContains.
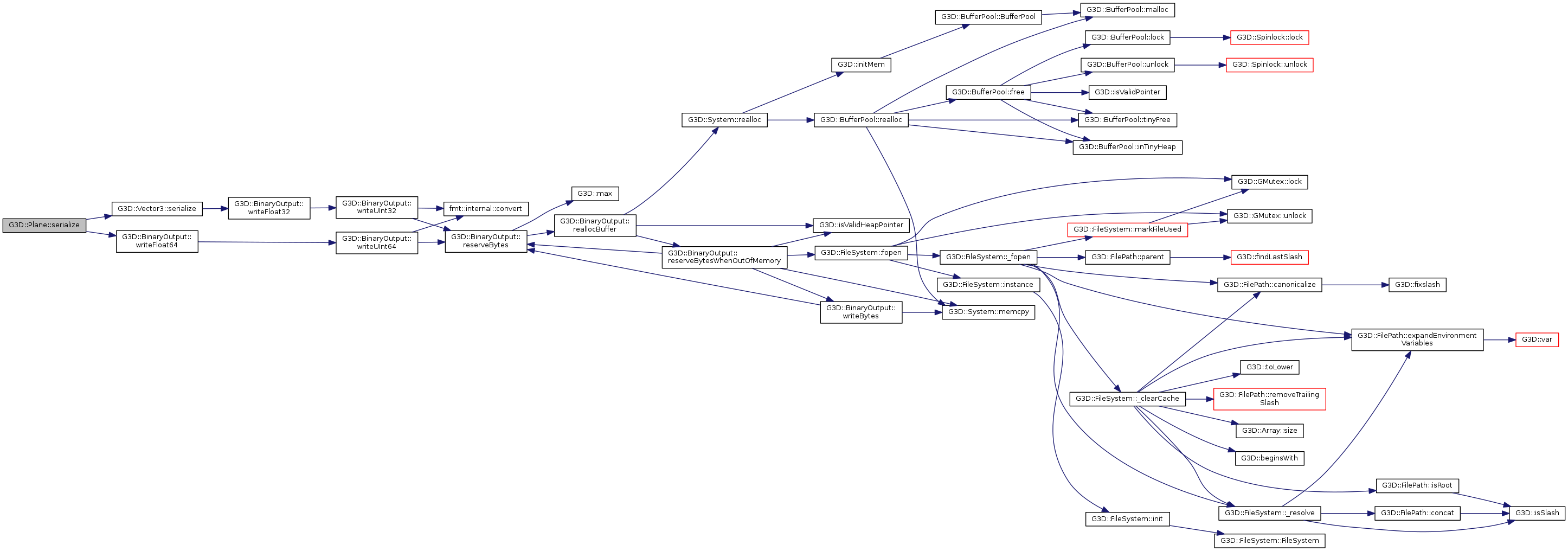
Here is the call graph for this function: Here is the caller graph for this function:| void G3D::Plane::serialize | ( | class BinaryOutput & | b | ) | const |
Here is the call graph for this function:| Any G3D::Plane::toAny | ( | ) | const |
Here is the call graph for this function:| std::string G3D::Plane::toString | ( | ) | const |
Here is the call graph for this function:
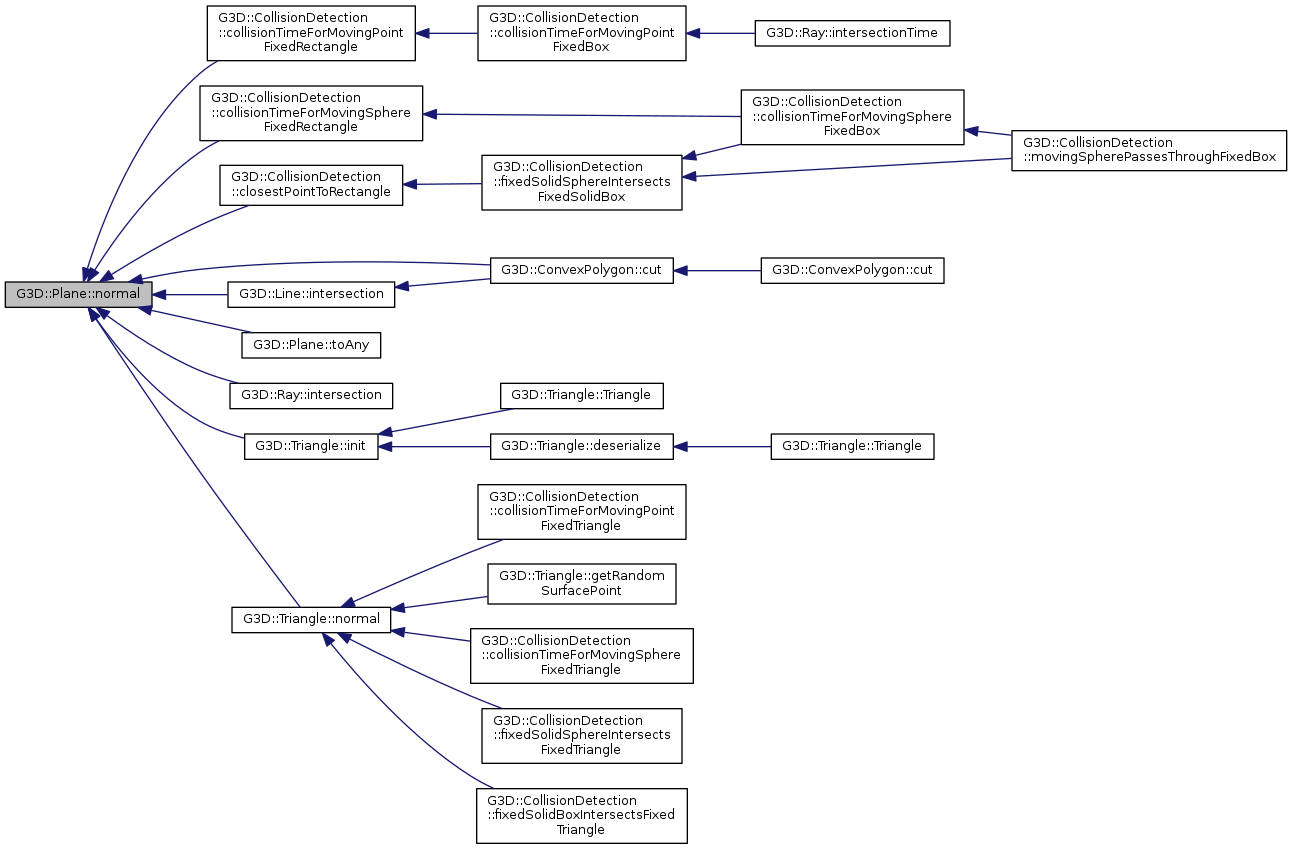
|
private |
|
private |
normal.Dot(x,y,z) = distance
 1.8.8
1.8.8