|
| #define | IR(x) ((uint32&)x) |
| |
| #define | AREA2(d, e, f) (((e)[i] - (d)[i]) * ((f)[j] - (d)[j]) - ((f)[i] - (d)[i]) * ((e)[j] - (d)[j])) |
| |
| #define | X 0 |
| |
| #define | Y 1 |
| |
| #define | Z 2 |
| |
| #define | FINDMINMAX(x0, x1, x2, min, max) |
| |
| #define | AXISTEST_X01(a, b, fa, fb) |
| |
| #define | AXISTEST_X2(a, b, fa, fb) |
| |
| #define | AXISTEST_Y02(a, b, fa, fb) |
| |
| #define | AXISTEST_Y1(a, b, fa, fb) |
| |
| #define | AXISTEST_Z12(a, b, fa, fb) |
| |
| #define | AXISTEST_Z0(a, b, fa, fb) |
| |
| #define AREA2 |
( |
|
d, |
|
|
|
e, |
|
|
|
f |
|
) |
| (((e)[i] - (d)[i]) * ((f)[j] - (d)[j]) - ((f)[i] - (d)[i]) * ((e)[j] - (d)[j])) |
| #define AXISTEST_X01 |
( |
|
a, |
|
|
|
b, |
|
|
|
fa, |
|
|
|
fb |
|
) |
| |
Value:p0 = a*v0[
Y] - b*v0[
Z]; \
p2 = a*v2[
Y] - b*v2[
Z]; \
rad = fa * boxhalfsize[
Y] + fb * boxhalfsize[
Z]; \
#define Z
Definition: CollisionDetection.cpp:2283
#define false
Definition: CascPort.h:18
T max(const T &x, const T &y)
Definition: g3dmath.h:320
T min(const T &x, const T &y)
Definition: g3dmath.h:305
#define Y
Definition: CollisionDetection.cpp:2282
| #define AXISTEST_X2 |
( |
|
a, |
|
|
|
b, |
|
|
|
fa, |
|
|
|
fb |
|
) |
| |
Value:p0 = a*v0[
Y] - b*v0[
Z]; \
p1 = a*v1[
Y] - b*v1[
Z]; \
rad = fa * boxhalfsize[
Y] + fb * boxhalfsize[
Z]; \
#define Z
Definition: CollisionDetection.cpp:2283
#define false
Definition: CascPort.h:18
T max(const T &x, const T &y)
Definition: g3dmath.h:320
T min(const T &x, const T &y)
Definition: g3dmath.h:305
#define Y
Definition: CollisionDetection.cpp:2282
| #define AXISTEST_Y02 |
( |
|
a, |
|
|
|
b, |
|
|
|
fa, |
|
|
|
fb |
|
) |
| |
Value:p0 = -a*v0[
X] + b*v0[
Z]; \
p2 = -a*v2[
X] + b*v2[
Z]; \
rad = fa * boxhalfsize[
X] + fb * boxhalfsize[
Z]; \
#define Z
Definition: CollisionDetection.cpp:2283
#define X
Definition: CollisionDetection.cpp:2281
#define false
Definition: CascPort.h:18
T max(const T &x, const T &y)
Definition: g3dmath.h:320
T min(const T &x, const T &y)
Definition: g3dmath.h:305
| #define AXISTEST_Y1 |
( |
|
a, |
|
|
|
b, |
|
|
|
fa, |
|
|
|
fb |
|
) |
| |
Value:p0 = -a*v0[
X] + b*v0[
Z]; \
p1 = -a*v1[
X] + b*v1[
Z]; \
rad = fa * boxhalfsize[
X] + fb * boxhalfsize[
Z]; \
#define Z
Definition: CollisionDetection.cpp:2283
#define X
Definition: CollisionDetection.cpp:2281
#define false
Definition: CascPort.h:18
T max(const T &x, const T &y)
Definition: g3dmath.h:320
T min(const T &x, const T &y)
Definition: g3dmath.h:305
| #define AXISTEST_Z0 |
( |
|
a, |
|
|
|
b, |
|
|
|
fa, |
|
|
|
fb |
|
) |
| |
Value:p0 = a*v0[
X] - b*v0[
Y]; \
p1 = a*v1[
X] - b*v1[
Y]; \
rad = fa * boxhalfsize[
X] + fb * boxhalfsize[
Y]; \
#define X
Definition: CollisionDetection.cpp:2281
#define false
Definition: CascPort.h:18
T max(const T &x, const T &y)
Definition: g3dmath.h:320
T min(const T &x, const T &y)
Definition: g3dmath.h:305
#define Y
Definition: CollisionDetection.cpp:2282
| #define AXISTEST_Z12 |
( |
|
a, |
|
|
|
b, |
|
|
|
fa, |
|
|
|
fb |
|
) |
| |
Value:p1 = a*v1[
X] - b*v1[
Y]; \
p2 = a*v2[
X] - b*v2[
Y]; \
rad = fa * boxhalfsize[
X] + fb * boxhalfsize[
Y]; \
#define X
Definition: CollisionDetection.cpp:2281
#define false
Definition: CascPort.h:18
T max(const T &x, const T &y)
Definition: g3dmath.h:320
T min(const T &x, const T &y)
Definition: g3dmath.h:305
#define Y
Definition: CollisionDetection.cpp:2282
| #define FINDMINMAX |
( |
|
x0, |
|
|
|
x1, |
|
|
|
x2, |
|
|
|
min, |
|
|
|
max |
|
) |
| |
Value:
T max(const T &x, const T &y)
Definition: g3dmath.h:320
T min(const T &x, const T &y)
Definition: g3dmath.h:305

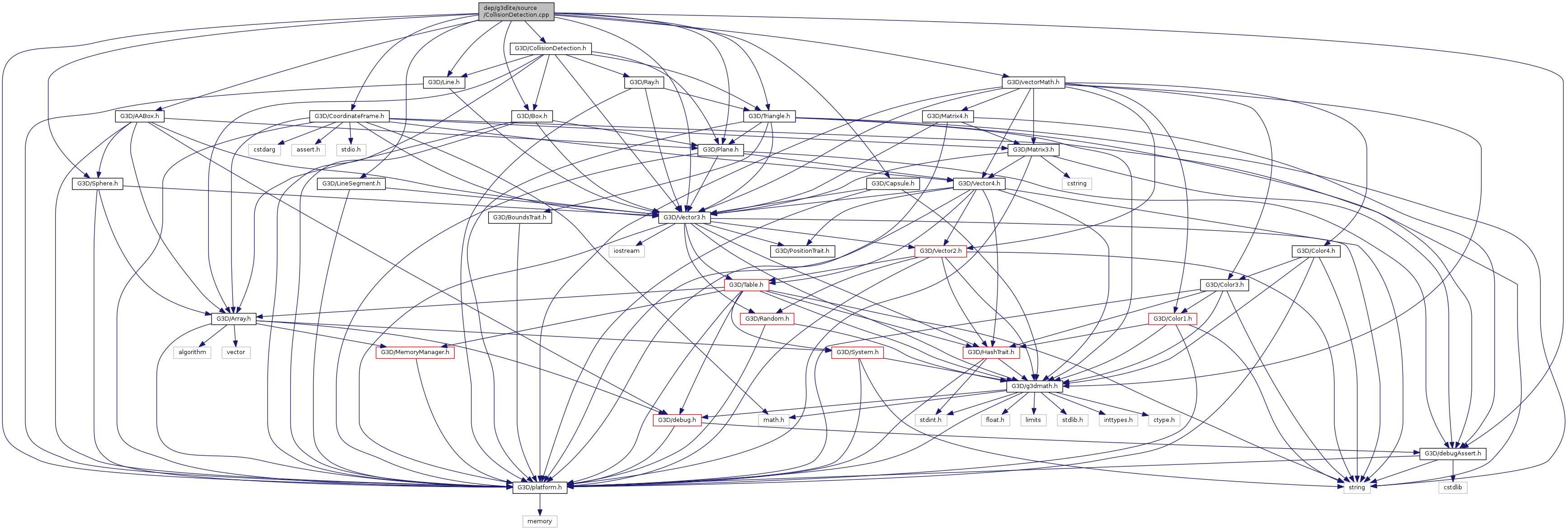
 Include dependency graph for CollisionDetection.cpp:
Include dependency graph for CollisionDetection.cpp: 1.8.8
1.8.8