#include <MoveSplineInitArgs.h>
| Movement::MoveSplineInitArgs::MoveSplineInitArgs |
( |
size_t |
path_capacity = 16 | ) |
|
|
inline |
47 path.reserve(path_capacity);
bool HasVelocity
Definition: MoveSplineInitArgs.h:59
float initialOrientation
Definition: MoveSplineInitArgs.h:58
int32 path_Idx_offset
Definition: MoveSplineInitArgs.h:53
float parabolic_amplitude
Definition: MoveSplineInitArgs.h:55
float time_perc
Definition: MoveSplineInitArgs.h:56
bool TransformForTransport
Definition: MoveSplineInitArgs.h:60
PointsArray path
Definition: MoveSplineInitArgs.h:50
float velocity
Definition: MoveSplineInitArgs.h:54
uint32 splineId
Definition: MoveSplineInitArgs.h:57
| bool Movement::MoveSplineInitArgs::_checkPathBounds |
( |
| ) |
const |
|
private |
223 MAX_OFFSET = (1 << 11) / 2
225 Vector3 middle = (
path.front()+
path.back()) / 2;
229 offset =
path[i] - middle;
230 if (std::fabs(offset.x) >= MAX_OFFSET || std::fabs(offset.y) >= MAX_OFFSET || std::fabs(offset.z) >= MAX_OFFSET)
232 TC_LOG_ERROR(
"misc",
"MoveSplineInitArgs::_checkPathBounds check failed");
MoveSplineFlag flags
Definition: MoveSplineInitArgs.h:52
Definition: MoveSplineFlag.h:43
PointsArray path
Definition: MoveSplineInitArgs.h:50
uint32_t uint32
Definition: Define.h:150
#define TC_LOG_ERROR(filterType__,...)
Definition: Log.h:207
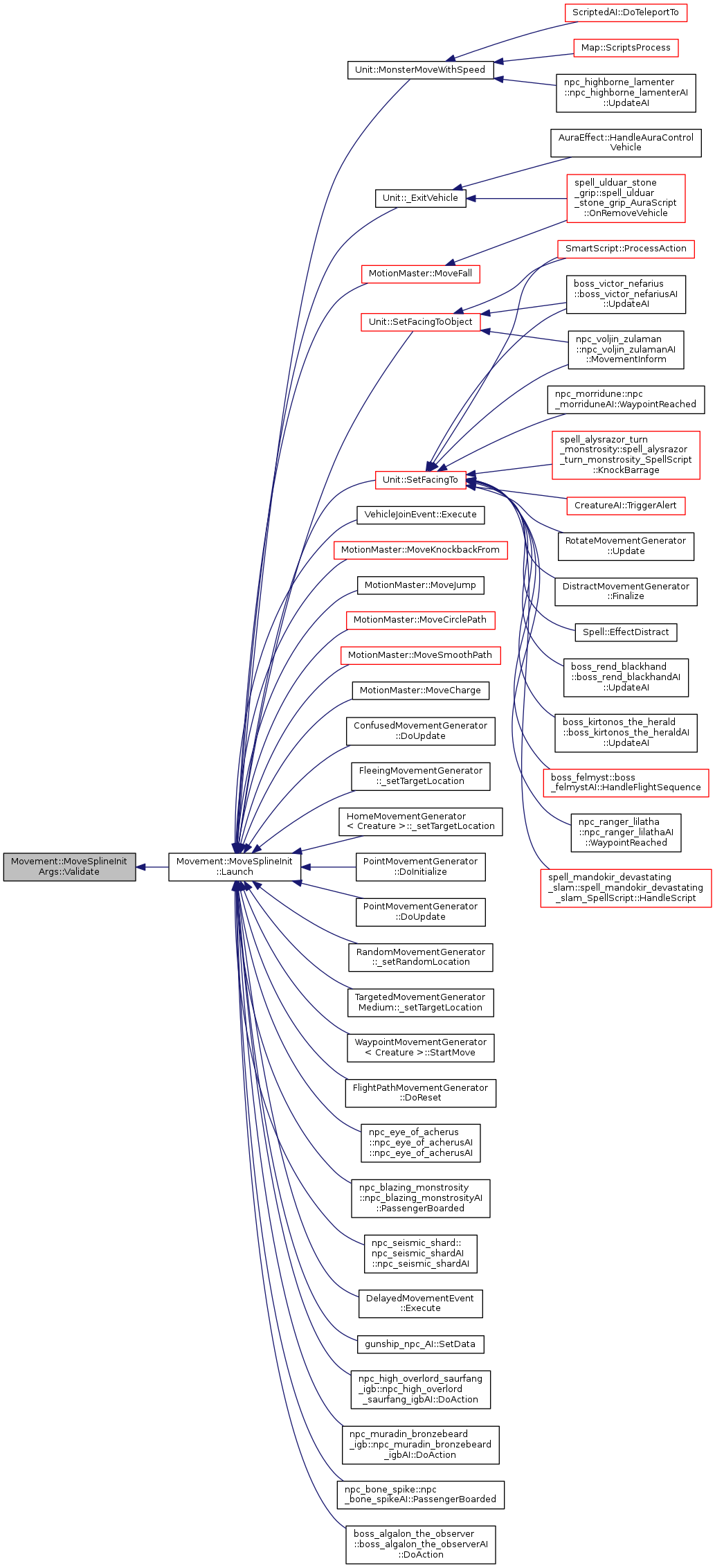
| bool Movement::MoveSplineInitArgs::Validate |
( |
Unit * |
unit | ) |
const |
============================================================================================
Returns true to show that the arguments were configured correctly and MoveSpline initialization will succeed.
205 TC_LOG_ERROR("misc", "MoveSplineInitArgs::Validate: expression '%s' failed for %s Entry: %u", #exp, unit->GetGUID().ToString().c_str(), unit->GetEntry());\
float time_perc
Definition: MoveSplineInitArgs.h:56
PointsArray path
Definition: MoveSplineInitArgs.h:50
float velocity
Definition: MoveSplineInitArgs.h:54
| bool Movement::MoveSplineInitArgs::HasVelocity |
| float Movement::MoveSplineInitArgs::initialOrientation |
| float Movement::MoveSplineInitArgs::parabolic_amplitude |
| int32 Movement::MoveSplineInitArgs::path_Idx_offset |
| uint32 Movement::MoveSplineInitArgs::splineId |
| float Movement::MoveSplineInitArgs::time_perc |
| bool Movement::MoveSplineInitArgs::TransformForTransport |
| float Movement::MoveSplineInitArgs::velocity |
The documentation for this struct was generated from the following files:

 Here is the caller graph for this function:
Here is the caller graph for this function: 1.8.8
1.8.8