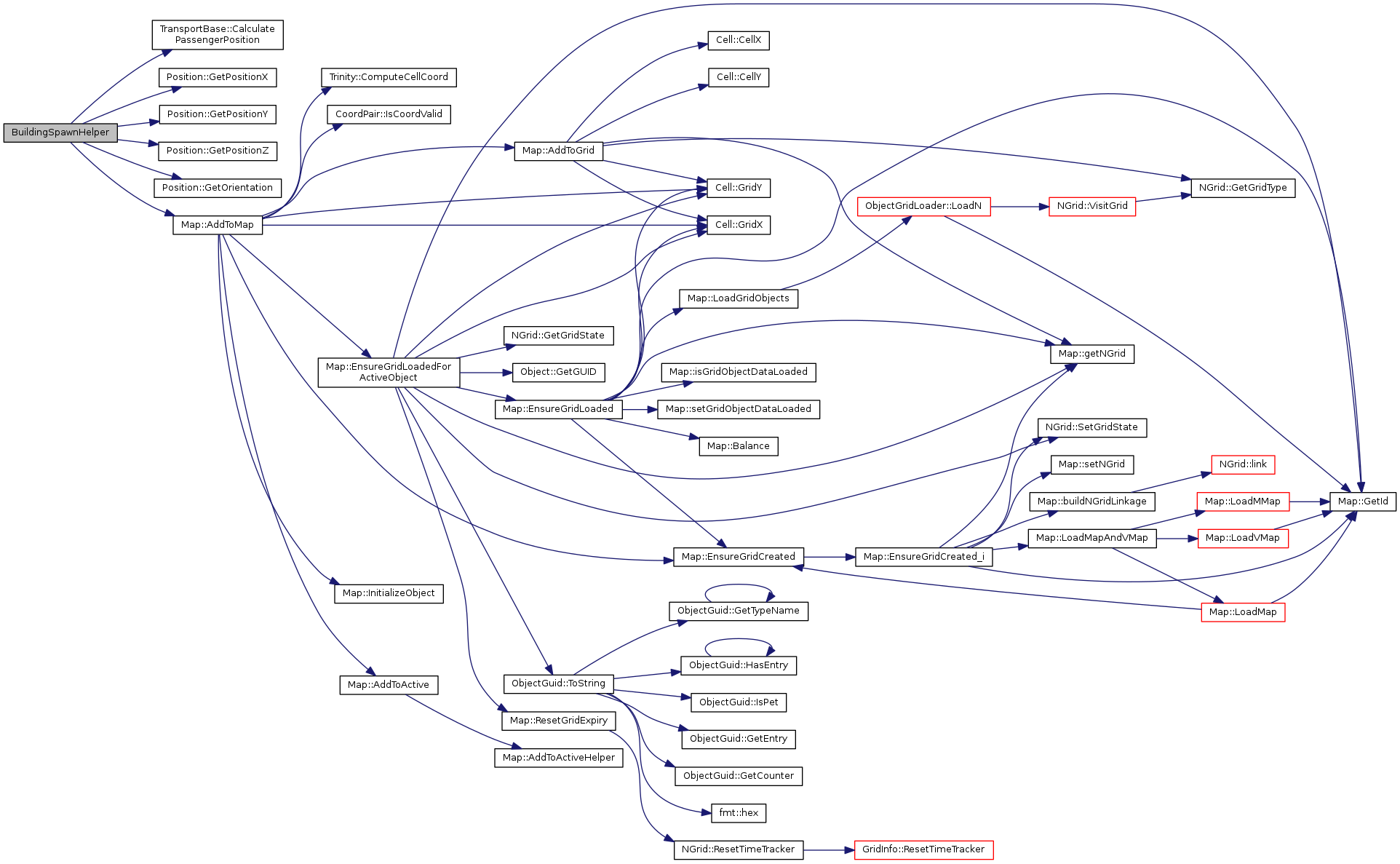
665 if (!spawn->LoadFromDB(spawnId, map))
671 float x = spawn->GetPositionX();
672 float y = spawn->GetPositionY();
673 float z = spawn->GetPositionZ();
674 float o = spawn->GetOrientation();
677 spawn->Relocate(x, y, z, o);
678 (spawn->*SecondaryRelocate)(x, y, z, o);
680 if (!spawn->IsPositionValid())
virtual void CalculatePassengerPosition(float &x, float &y, float &z, float *o=NULL) const =0
This method transforms supplied transport offsets into global coordinates.
float GetOrientation() const
Definition: Position.h:107
float GetPositionY() const
Definition: Position.h:105
G3D::int16 z
Definition: Vector3int16.h:46
bool AddToMap(T *)
Definition: Map.cpp:566
float GetPositionZ() const
Definition: Position.h:106
G3D::int16 y
Definition: Vector2int16.h:38
G3D::int16 x
Definition: Vector2int16.h:37
float GetPositionX() const
Definition: Position.h:104

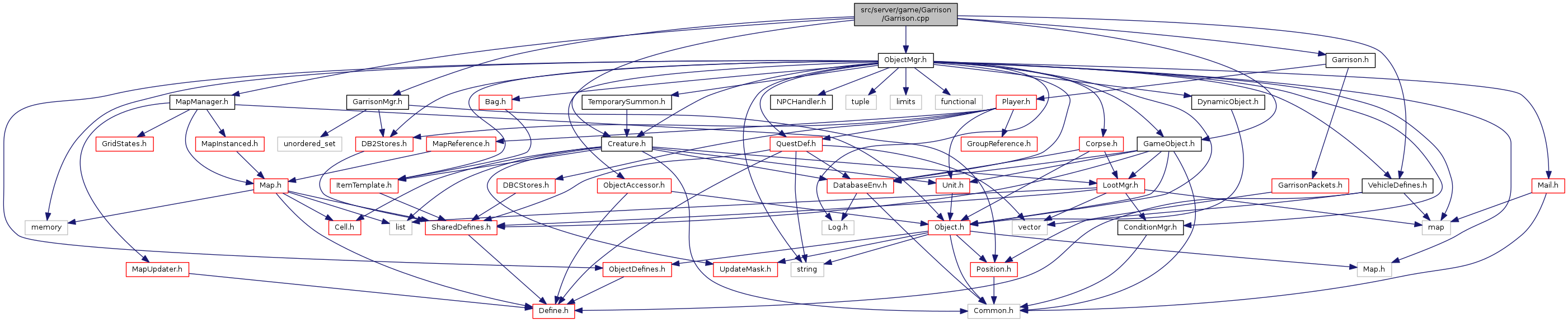
 Include dependency graph for Garrison.cpp:
Include dependency graph for Garrison.cpp: 1.8.8
1.8.8