SciPy-数值计算库¶
SciPy函数库在NumPy库的基础上增加了众多的数学、科学以及工程计算中常用的库函数。例如线性代数、常微分方程数值求解、信号处理、图像处理、稀疏矩阵等等。由于其涉及的领域众多、本书没有能力对其一一的进行介绍。作为入门介绍,让我们看看如何用SciPy进行插值处理、信号滤波以及用C语言加速计算。
最小二乘拟合¶
假设有一组实验数据(x[i], y[i]),我们知道它们之间的函数关系:y = f(x),通过这些已知信息,需要确定函数中的一些参数项。例如,如果f是一个线型函数f(x) = k*x+b,那么参数k和b就是我们需要确定的值。如果将这些参数用 p 表示的话,那么我们就是要找到一组 p 值使得如下公式中的S函数最小:
![S(\mathbf{p}) = \sum_{i=1}^m [y_i - f(x_i, \mathbf{p}) ]^2](_images/math/8da054a2d9fb73326f9fc0a3141cea13d49db11f.png)
这种算法被称之为最小二乘拟合(Least-square fitting)。
scipy中的子函数库optimize已经提供了实现最小二乘拟合算法的函数leastsq。下面是用leastsq进行数据拟合的一个例子:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 | # -*- coding: utf-8 -*-
import numpy as np
from scipy.optimize import leastsq
import pylab as pl
def func(x, p):
"""
数据拟合所用的函数: A*sin(2*pi*k*x + theta)
"""
A, k, theta = p
return A*np.sin(2*np.pi*k*x+theta)
def residuals(p, y, x):
"""
实验数据x, y和拟合函数之间的差,p为拟合需要找到的系数
"""
return y - func(x, p)
x = np.linspace(0, -2*np.pi, 100)
A, k, theta = 10, 0.34, np.pi/6 # 真实数据的函数参数
y0 = func(x, [A, k, theta]) # 真实数据
y1 = y0 + 2 * np.random.randn(len(x)) # 加入噪声之后的实验数据
p0 = [7, 0.2, 0] # 第一次猜测的函数拟合参数
# 调用leastsq进行数据拟合
# residuals为计算误差的函数
# p0为拟合参数的初始值
# args为需要拟合的实验数据
plsq = leastsq(residuals, p0, args=(y1, x))
print u"真实参数:", [A, k, theta]
print u"拟合参数", plsq[0] # 实验数据拟合后的参数
pl.plot(x, y0, label=u"真实数据")
pl.plot(x, y1, label=u"带噪声的实验数据")
pl.plot(x, func(x, plsq[0]), label=u"拟合数据")
pl.legend()
pl.show()
|
这个例子中我们要拟合的函数是一个正弦波函数,它有三个参数 A, k, theta ,分别对应振幅、频率、相角。假设我们的实验数据是一组包含噪声的数据 x, y1,其中y1是在真实数据y0的基础上加入噪声的到了。
通过leastsq函数对带噪声的实验数据x, y1进行数据拟合,可以找到x和真实数据y0之间的正弦关系的三个参数: A, k, theta。下面是程序的输出:
>>> 真实参数: [10, 0.34000000000000002, 0.52359877559829882]
>>> 拟合参数 [-9.84152775 0.33829767 -2.68899335]
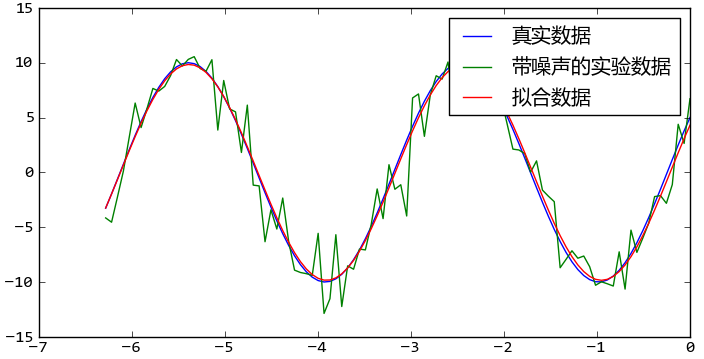
调用leastsq函数对噪声正弦波数据进行曲线拟合
我们看到拟合参数虽然和真实参数完全不同,但是由于正弦函数具有周期性,实际上拟合参数得到的函数和真实参数对应的函数是一致的。
函数最小值¶
optimize库提供了几个求函数最小值的算法:fmin, fmin_powell, fmin_cg, fmin_bfgs。下面的程序通过求解卷积的逆运算演示fmin的功能。
对于一个离散的线性时不变系统h, 如果它的输入是x,那么其输出y可以用x和h的卷积表示:

现在的问题是如果已知系统的输入x和输出y,如何计算系统的传递函数h;或者如果已知系统的传递函数h和系统的输出y,如何计算系统的输入x。这种运算被称为反卷积运算,是十分困难的,特别是在实际的运用中,测量系统的输出总是存在误差的。
下面用fmin计算反卷积,这种方法只能用在很小规模的数列之上,因此没有很大的实用价值,不过用来评价fmin函数的性能还是不错的。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 | # -*- coding: utf-8 -*-
# 本程序用各种fmin函数求卷积的逆运算
import scipy.optimize as opt
import numpy as np
def test_fmin_convolve(fminfunc, x, h, y, yn, x0):
"""
x (*) h = y, (*)表示卷积
yn为在y的基础上添加一些干扰噪声的结果
x0为求解x的初始值
"""
def convolve_func(h):
"""
计算 yn - x (*) h 的power
fmin将通过计算使得此power最小
"""
return np.sum((yn - np.convolve(x, h))**2)
# 调用fmin函数,以x0为初始值
h0 = fminfunc(convolve_func, x0)
print fminfunc.__name__
print "---------------------"
# 输出 x (*) h0 和 y 之间的相对误差
print "error of y:", np.sum((np.convolve(x, h0)-y)**2)/np.sum(y**2)
# 输出 h0 和 h 之间的相对误差
print "error of h:", np.sum((h0-h)**2)/np.sum(h**2)
print
def test_n(m, n, nscale):
"""
随机产生x, h, y, yn, x0等数列,调用各种fmin函数求解b
m为x的长度, n为h的长度, nscale为干扰的强度
"""
x = np.random.rand(m)
h = np.random.rand(n)
y = np.convolve(x, h)
yn = y + np.random.rand(len(y)) * nscale
x0 = np.random.rand(n)
test_fmin_convolve(opt.fmin, x, h, y, yn, x0)
test_fmin_convolve(opt.fmin_powell, x, h, y, yn, x0)
test_fmin_convolve(opt.fmin_cg, x, h, y, yn, x0)
test_fmin_convolve(opt.fmin_bfgs, x, h, y, yn, x0)
if __name__ == "__main__":
test_n(200, 20, 0.1)
|
下面是程序的输出:
fmin
ーーーーーーーーーーー
error of y: 0.00568756699607
error of h: 0.354083287918
fmin_powell
ーーーーーーーーーーー
error of y: 0.000116114709857
error of h: 0.000258897894009
fmin_cg
ーーーーーーーーーーー
error of y: 0.000111220299615
error of h: 0.000211404733439
fmin_bfgs
ーーーーーーーーーーー
error of y: 0.000111220251551
error of h: 0.000211405138529
非线性方程组求解¶
optimize库中的fsolve函数可以用来对非线性方程组进行求解。它的基本调用形式如下:
fsolve(func, x0)
func(x)是计算方程组误差的函数,它的参数x是一个矢量,表示方程组的各个未知数的一组可能解,func返回将x代入方程组之后得到的误差;x0为未知数矢量的初始值。如果要对如下方程组进行求解的话:
- f1(u1,u2,u3) = 0
- f2(u1,u2,u3) = 0
- f3(u1,u2,u3) = 0
那么func可以如下定义:
def func(x):
u1,u2,u3 = x
return [f1(u1,u2,u3), f2(u1,u2,u3), f3(u1,u2,u3)]
下面是一个实际的例子,求解如下方程组的解:
- 5*x1 + 3 = 0
- 4*x0*x0 - 2*sin(x1*x2) = 0
- x1*x2 - 1.5 = 0
程序如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | from scipy.optimize import fsolve
from math import sin,cos
def f(x):
x0 = float(x[0])
x1 = float(x[1])
x2 = float(x[2])
return [
5*x1+3,
4*x0*x0 - 2*sin(x1*x2),
x1*x2 - 1.5
]
result = fsolve(f, [1,1,1])
print result
print f(result)
|
输出为:
[-0.70622057 -0.6 -2.5 ]
[0.0, -9.1260332624187868e-14, 5.3290705182007514e-15]
由于fsolve函数在调用函数f时,传递的参数为数组,因此如果直接使用数组中的元素计算的话,计算速度将会有所降低,因此这里先用float函数将数组中的元素转换为Python中的标准浮点数,然后调用标准math库中的函数进行运算。
在对方程组进行求解时,fsolve会自动计算方程组的雅可比矩阵,如果方程组中的未知数很多,而与每个方程有关的未知数较少时,即雅可比矩阵比较稀疏时,传递一个计算雅可比矩阵的函数将能大幅度提高运算速度。笔者在一个模拟计算的程序中需要大量求解近有50个未知数的非线性方程组的解。每个方程平均与6个未知数相关,通过传递雅可比矩阵的计算函数使计算速度提高了4倍。
雅可比矩阵
雅可比矩阵是一阶偏导数以一定方式排列的矩阵,它给出了可微分方程与给定点的最优线性逼近,因此类似于多元函数的导数。例如前面的函数f1,f2,f3和未知数u1,u2,u3的雅可比矩阵如下:
![\begin{bmatrix}
\dfrac{\partial f1}{\partial u1} & \dfrac{\partial f1}{\partial u2} & \dfrac{\partial f1}{\partial u3} \\[9pt]
\dfrac{\partial f2}{\partial u1} & \dfrac{\partial f2}{\partial u2} & \dfrac{\partial f2}{\partial u3} \\[9pt]
\dfrac{\partial f3}{\partial u1} & \dfrac{\partial f3}{\partial u2} & \dfrac{\partial f3}{\partial u3} \\
\end{bmatrix}](_images/math/0e0589610ac2875dcd7d12db88259d4076bd8fe7.png)
使用雅可比矩阵的fsolve实例如下,计算雅可比矩阵的函数j通过fprime参数传递给fsolve,函数j和函数f一样,有一个未知数的解矢量参数x,函数j计算非线性方程组在矢量x点上的雅可比矩阵。由于这个例子中未知数很少,因此程序计算雅可比矩阵并不能带来计算速度的提升。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 | # -*- coding: utf-8 -*-
from scipy.optimize import fsolve
from math import sin,cos
def f(x):
x0 = float(x[0])
x1 = float(x[1])
x2 = float(x[2])
return [
5*x1+3,
4*x0*x0 - 2*sin(x1*x2),
x1*x2 - 1.5
]
def j(x):
x0 = float(x[0])
x1 = float(x[1])
x2 = float(x[2])
return [
[0, 5, 0],
[8*x0, -2*x2*cos(x1*x2), -2*x1*cos(x1*x2)],
[0, x2, x1]
]
result = fsolve(f, [1,1,1], fprime=j)
print result
print f(result)
|
B-Spline样条曲线¶
interpolate库提供了许多对数据进行插值运算的函数。下面是使用直线和B-Spline对正弦波上的点进行插值的例子。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | # -*- coding: utf-8 -*-
import numpy as np
import pylab as pl
from scipy import interpolate
x = np.linspace(0, 2*np.pi+np.pi/4, 10)
y = np.sin(x)
x_new = np.linspace(0, 2*np.pi+np.pi/4, 100)
f_linear = interpolate.interp1d(x, y)
tck = interpolate.splrep(x, y)
y_bspline = interpolate.splev(x_new, tck)
pl.plot(x, y, "o", label=u"原始数据")
pl.plot(x_new, f_linear(x_new), label=u"线性插值")
pl.plot(x_new, y_bspline, label=u"B-spline插值")
pl.legend()
pl.show()
|
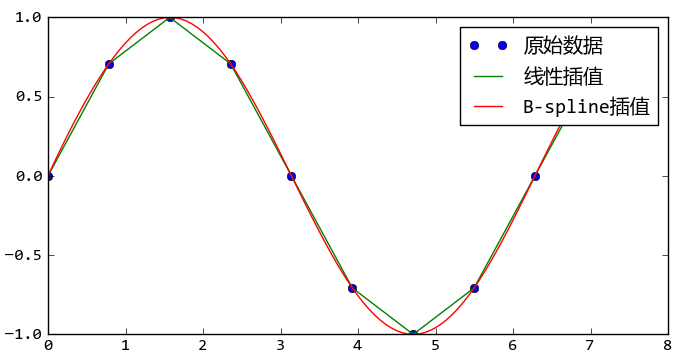
使用interpolate库对正弦波数据进行线性插值和B-Spline插值
在这段程序中,通过interp1d函数直接得到一个新的线性插值函数。而B-Spline插值运算需要先使用splrep函数计算出B-Spline曲线的参数,然后将参数传递给splev函数计算出各个取样点的插值结果。
数值积分¶
数值积分是对定积分的数值求解,例如可以利用数值积分计算某个形状的面积。下面让我们来考虑一下如何计算半径为1的半圆的面积,根据圆的面积公式,其面积应该等于PI/2。单位半圆曲线可以用下面的函数表示:
def half_circle(x):
return (1-x**2)**0.5
下面的程序使用经典的分小矩形计算面积总和的方式,计算出单位半圆的面积:
>>> N = 10000
>>> x = np.linspace(-1, 1, N)
>>> dx = 2.0/N
>>> y = half_circle(x)
>>> dx * np.sum(y[:-1] + y[1:]) # 面积的两倍
3.1412751679988937
利用上述方式计算出的圆上一系列点的坐标,还可以用numpy.trapz进行数值积分:
>>> import numpy as np
>>> np.trapz(y, x) * 2 # 面积的两倍
3.1415893269316042
此函数计算的是以x,y为顶点坐标的折线与X轴所夹的面积。同样的分割点数,trapz函数的结果更加接近精确值一些。
如果我们调用scipy.integrate库中的quad函数的话,将会得到非常精确的结果:
>>> from scipy import integrate
>>> pi_half, err = integrate.quad(half_circle, -1, 1)
>>> pi_half*2
3.1415926535897984
多重定积分的求值可以通过多次调用quad函数实现,为了调用方便,integrate库提供了dblquad函数进行二重定积分,tplquad函数进行三重定积分。下面以计算单位半球体积为例说明dblquad函数的用法。
单位半球上的点(x,y,z)符合如下方程:

因此可以如下定义通过(x,y)坐标计算球面上点的z值的函数:
def half_sphere(x, y):
return (1-x**2-y**2)**0.5
X-Y轴平面与此球体的交线为一个单位圆,因此积分区间为此单位圆,可以考虑为X轴坐标从-1到1进行积分,而Y轴从 -half_circle(x) 到 half_circle(x) 进行积分,于是可以调用dblquad函数:
>>> integrate.dblquad(half_sphere, -1, 1,
lambda x:-half_circle(x),
lambda x:half_circle(x))
>>> (2.0943951023931988, 2.3252456653390915e-14)
>>> np.pi*4/3/2 # 通过球体体积公式计算的半球体积
2.0943951023931953
dblquad函数的调用方式为:
dblquad(func2d, a, b, gfun, hfun)
对于func2d(x,y)函数进行二重积分,其中a,b为变量x的积分区间,而gfun(x)到hfun(x)为变量y的积分区间。
半球体积的积分的示意图如下:

半球体积的双重定积分示意图
X轴的积分区间为-1.0到1.0,对于X=x0时,通过对Y轴的积分计算出切面的面积,因此Y轴的积分区间如图中红色点线所示。
解常微分方程组¶
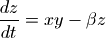
scipy.integrate库提供了数值积分和常微分方程组求解算法odeint。下面让我们来看看如何用odeint计算洛仑兹吸引子的轨迹。洛仑兹吸引子由下面的三个微分方程定义:
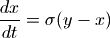
洛仑兹吸引子的详细介绍: http://bzhang.lamost.org/website/archives/lorenz_attactor
这三个方程定义了三维空间中各个坐标点上的速度矢量。从某个坐标开始沿着速度矢量进行积分,就可以计算出无质量点在此空间中的运动轨迹。其中  ,
,  ,
,  为三个常数,不同的参数可以计算出不同的运动轨迹: x(t), y(t), z(t)。 当参数为某些值时,轨迹出现馄饨现象:即微小的初值差别也会显著地影响运动轨迹。下面是洛仑兹吸引子的轨迹计算和绘制程序:
为三个常数,不同的参数可以计算出不同的运动轨迹: x(t), y(t), z(t)。 当参数为某些值时,轨迹出现馄饨现象:即微小的初值差别也会显著地影响运动轨迹。下面是洛仑兹吸引子的轨迹计算和绘制程序:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 | # -*- coding: utf-8 -*-
from scipy.integrate import odeint
import numpy as np
def lorenz(w, t, p, r, b):
# 给出位置矢量w,和三个参数p, r, b计算出
# dx/dt, dy/dt, dz/dt的值
x, y, z = w
# 直接与lorenz的计算公式对应
return np.array([p*(y-x), x*(r-z)-y, x*y-b*z])
t = np.arange(0, 30, 0.01) # 创建时间点
# 调用ode对lorenz进行求解, 用两个不同的初始值
track1 = odeint(lorenz, (0.0, 1.00, 0.0), t, args=(10.0, 28.0, 3.0))
track2 = odeint(lorenz, (0.0, 1.01, 0.0), t, args=(10.0, 28.0, 3.0))
# 绘图
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
fig = plt.figure()
ax = Axes3D(fig)
ax.plot(track1[:,0], track1[:,1], track1[:,2])
ax.plot(track2[:,0], track2[:,1], track2[:,2])
plt.show()
|
用odeint函数对洛仑兹吸引子微分方程进行数值求解所得到的运动轨迹
我们看到即使初始值只相差0.01,两条运动轨迹也是完全不同的。
在程序中先定义一个lorenz函数,它的任务是计算出某个位置的各个方向的微分值,这个计算直接根据洛仑兹吸引子的公式得出。然后调用odeint,对微分方程求解,odeint有许多参数,这里用到的四个参数分别为:
- lorenz, 它是计算某个位移上的各个方向的速度(位移的微分)
- (0.0, 1.0, 0.0),位移初始值。计算常微分方程所需的各个变量的初始值
- t, 表示时间的数组,odeint对于此数组中的每个时间点进行求解,得出所有时间点的位置
- args, 这些参数直接传递给lorenz函数,因此它们都是常量
滤波器设计¶
scipy.signal库提供了许多信号处理方面的函数。在这一节,让我们来看看如何利用signal库设计滤波器,查看滤波器的频率响应,以及如何使用滤波器对信号进行滤波。
假设如下导入signal库:
>>> import scipy.signal as signal
下面的程序设计一个带通IIR滤波器:
>>> b, a = signal.iirdesign([0.2, 0.5], [0.1, 0.6], 2, 40)
这个滤波器的通带为0.2*f0到0.5*f0,阻带为小于0.1*f0和大于0.6*f0,其中f0为1/2的信号取样频率,如果取样频率为8kHz的话,那么这个带通滤波器的通带为800Hz到2kHz。通带的最大增益衰减为2dB,阻带的最小增益衰减为40dB,即通带的增益浮动在2dB之内,阻带至少有40dB的衰减。
iirdesgin返回的两个数组b和a, 它们分别是IIR滤波器的分子和分母部分的系数。其中a[0]恒等于1。
下面通过调用freqz计算所得到的滤波器的频率响应:
>>> w, h = signal.freqz(b, a)
freqz返回两个数组w和h,其中w是圆频率数组,通过w/pi*f0可以计算出其对应的实际频率。h是w中的对应频率点的响应,它是一个复数数组,其幅值为滤波器的增益,相角为滤波器的相位特性。
下面计算h的增益特性,并转换为dB度量。由于h中存在幅值几乎为0的值,因此先用clip函数对其裁剪之后,再调用对数函数,避免计算出错。
>>> power = 20*np.log10(np.clip(np.abs(h), 1e-8, 1e100))
通过下面的语句可以绘制出滤波器的增益特性图,这里假设取样频率为8kHz:
>>> pl.plot(w/np.pi*4000, power)
在实际运用中为了测量未知系统的频率特性,经常将频率扫描波输入到系统中,观察系统的输出,从而计算其频率特性。下面让我们来模拟这一过程。
为了调用chirp函数以产生频率扫描波形的数据,首先需要产生一个等差数组代表取样时间,下面的语句产生2秒钟取样频率为8kHz的取样时间数组:
>>> t = np.arange(0, 2, 1/8000.0)
然后调用chirp得到2秒钟的频率扫描波形的数据:
>>> sweep = signal.chirp(t, f0=0, t1 = 2, f1=4000.0)
频率扫描波的开始频率f0为0Hz,结束频率f1为4kHz,到达4kHz的时间为2秒,使用数组t作为取样时间点。
下面通过调用lfilter函数计算sweep波形经过带通滤波器之后的结果:
>>> out = signal.lfilter(b, a, sweep)
lfilter内部通过如下算式计算IIR滤波器的输出:
通过如下算式可以计算输入为x时的滤波器的输出,其中数组x代表输入信号,y代表输出信号:
![y[n] & = b[0] x[n] + b[1] x[n-1] + \cdots + b[P] x[n-P] \\
& - a[1] y[n-1] - a[2] y[n-2] - \cdots - a[Q] y[n-Q]](_images/math/8c429be55d6571ecd8bf39cf20455defe09eadcd.png)
为了和系统的增益特性图进行比较,需要获取输出波形的包络,因此下面先将输出波形数据转换为能量值:
>>> out = 20*np.log10(np.abs(out))
为了计算包络,找到所有能量大于前后两个取样点(局部最大点)的下标:
>>> index = np.where(np.logical_and(out[1:-1] > out[:-2], out[1:-1] > out[2:]))[0] + 1
最后将时间转换为对应的频率,绘制所有局部最大点的能量值:
>>> pl.plot(t[index]/2.0*4000, out[index] )
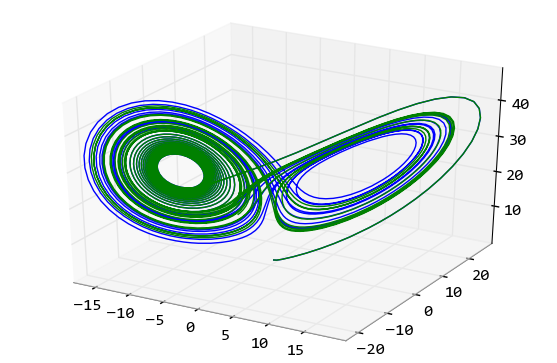
下图显示freqz计算的频谱和频率扫描波得到的频率特性,我们看到其结果是一致的。
带通IIR滤波器的频率响应和频率扫描波计算的结果比较
计算此图的完整源程序请查看附录中的 带通滤波器设计 。
用Weave嵌入C语言¶
Python作为动态语言其功能虽然强大,但是在数值计算方面有一个最大的缺点:速度不够快。在Python级别的循环和计算的速度只有C语言程序的百分之一。因此才有了NumPy, SciPy这样的函数库,将高度优化的C、Fortran的函数库进行包装,以供Python程序调用。如果这些高度优化的函数库无法实现我们的算法,必须从头开始写循环、计算的话,那么用Python来做显然是不合适的。因此SciPy提供了快速调用C++语言程序的方法-- Weave。下面是对NumPy的数组求和的例子:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 | # -*- coding: utf-8 -*-
import scipy.weave as weave
import numpy as np
import time
def my_sum(a):
n=int(len(a))
code="""
int i;
double counter;
counter =0;
for(i=0;i<n;i++){
counter=counter+a(i);
}
return_val=counter;
"""
err=weave.inline(
code,['a','n'],
type_converters=weave.converters.blitz,
compiler="gcc"
)
return err
a = np.arange(0, 10000000, 1.0)
# 先调用一次my_sum,weave会自动对C语言进行编译,此后直接运行编译之后的代码
my_sum(a)
start = time.clock()
for i in xrange(100):
my_sum(a) # 直接运行编译之后的代码
print "my_sum:", (time.clock() - start) / 100.0
start = time.clock()
for i in xrange(100):
np.sum( a ) # numpy中的sum,其实现也是C语言级别
print "np.sum:", (time.clock() - start) / 100.0
start = time.clock()
print sum(a) # Python内部函数sum通过数组a的迭代接口访问其每个元素,因此速度很慢
print "sum:", time.clock() - start
|
此例子在我的电脑上的运行结果为:
my_sum: 0.0294527349146
np.sum: 0.0527649547638
sum: 9.11022322669
可以看到用Weave编译的C语言程序比numpy自带的sum函数还要快。而Python的内部函数sum使用数组的迭代器接口进行运算,因此速度是Python语言级别的,只有Weave版本的1/300。
weave.inline函数的第一个参数为需要执行的C++语言代码,第二个参数是一个列表,它告诉weave要把Python中的两个变量a和n传递给C++程序,注意我们用字符串表示变量名。converters.blitz是一个类型转换器,将numpy的数组类型转换为C++的blitz类。C++程序中的变量a不是一个数组,而是blitz类的实例,因此它使用a(i)获得其各个元素的值,而不是用a[i]。最后我们通过compiler参数告诉weave要采用gcc为C++编译器。如果你安装的是python(x,y)的话,gcc(mingw32)也一起安装好了,否则你可能需要手工安装gcc编译器或者微软的Visual C++。
Note
在我的电脑上,虽然安装了Visual C++ 2008 Express,但仍然提示找不到合适的Visual C++编译器。似乎必须使用编译Python的编译器版本。因此还是用gcc来的方便。
本书的进阶部分还会对weave进行详细介绍。这段程序先给了我们一个定心丸:你再也不必担心Python的计算速度不够快了。