

Physics Manager
You can access the Physics Manager by selecting from the menu bar.
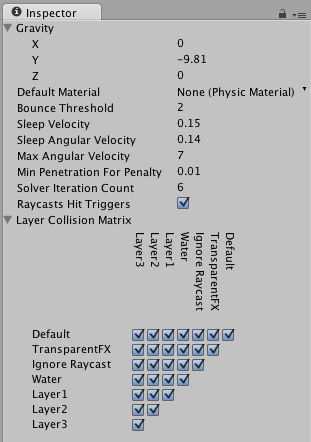
The Physics Manager
Properties
| Gravity | The amount of gravity applied to all Rigidbodies. Usually gravity acts only on the Y-axis (negative is down). Gravity is meters/(seconds^2). |
| Default Material | The default Physic Material that will be used if none has been assigned to an individual Collider. |
| Bounce Threshold | Two colliding objects with a relative velocity below this value will not bounce. This value also reduces jitter so it is not recommended to set it to a very low value. |
| Sleep Velocity | The default linear velocity, below which objects start going to sleep. |
| Sleep Angular Velocity | The default angular velocity, below which objects start going to sleep. |
| Max Angular Velocity | The default maximimum angular velocity permitted for any Rigidbodies. The angular velocity of Rigidbodies is clamped to stay within Max Angular Velocity to avoid numerical instability with quickly rotating bodies. Because this may prevent intentional fast rotations on objects such as wheels, you can override this value for any Rigidbody by scripting Rigidbody.maxAngularVelocity. |
| Min Penetration For Penalty | How deep in meters are two objects allowed to penetrate before the collision solver pushes them apart. A higher value will make objects penetrate more but reduces jitter. |
| Solver Iteration Count | Determines how accurately joints and contacts are resolved. Usually a value of 7 works very well for almost all situations. |
| Raycasts Hit Triggers | If enabled, any Raycast that intersects with a Collider marked as a Trigger will return a hit. If disabled, these intersections will not return a hit. |
| Layer Collision Matrix | Defines how the layer-based collision detection system will behave. |
Details
The Physics Manager is where you define the default behaviors of your world. For an explanation of Rigidbody Sleeping, read this page about sleeping.
Hints
- If you are having trouble with connected bodies oscillating and behaving eratically, setting a higher Solver Iteration Count may improve their stability, but will require more processing power.