#include <PhysicsGenericConstraint.h>
List of all members.
Detailed Description
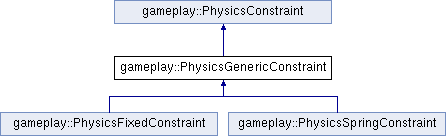
Defines a completely generic constraint between two rigid bodies (or one rigid body and the world) where the limits for all six degrees of freedom can be set individually.
- See also:
- http://gameplay3d.github.io/GamePlay/docs/file-formats.html#wiki-Constraints
Constructor & Destructor Documentation
Constructor.
Note: This should only used by subclasses that do not want the _constraint member variable to be initialized.
Creates a generic constraint so that the rigid body (or bodies) is (are) constrained to its (their) current world position(s).
- Parameters:
-
| a | The first (possibly only) rigid body to constrain. If this is the only rigid body specified the constraint applies between it and the global physics world object. |
| b | The second rigid body to constrain (optional). |
Creates a generic constraint.
- Parameters:
-
| a | The first (possibly only) rigid body to constrain. If this is the only rigid body specified the constraint applies between it and the global physics world object. |
| rotationOffsetA | The rotation offset for the first rigid body (in its local space) with respect to the constraint joint. |
| translationOffsetA | The translation offset for the first rigid body (in its local space) with respect to the constraint joint. |
| b | The second rigid body to constrain (optional). |
| rotationOffsetB | The rotation offset for the second rigid body (in its local space) with respect to the constraint joint (optional). |
| translationOffsetB | The translation offset for the second rigid body (in its local space) with respect to the constraint joint (optional). |
Member Function Documentation
Gets the rotation offset for the first rigid body in the constraint.
- Returns:
- The rotation offset.
Gets the rotation offset for the second rigid body in the constraint.
- Returns:
- The rotation offset.
Gets the translation offset for the first rigid body in the constraint.
- Returns:
- The translation offset.
Gets the translation offset for the second rigid body in the constraint.
- Returns:
- The translation offset.
Sets the lower angular limits (as Euler angle limits) along the constraint's local X, Y, and Z axes using the values in the given vector.
- Parameters:
-
| limits | The lower angular limits (as Euler angle limits) along the local X, Y, and Z axes. |
Reimplemented in gameplay::PhysicsFixedConstraint.
Sets the upper angular limits (as Euler angle limits) along the constraint's local X, Y, and Z axes using the values in the given vector.
- Parameters:
-
| limits | The upper angular limits (as Euler angle limits) along the local X, Y, and Z axes. |
Reimplemented in gameplay::PhysicsFixedConstraint.
Sets the lower linear limits along the constraint's local X, Y, and Z axes using the values in the given vector.
- Parameters:
-
| limits | The lower linear limits along the local X, Y, and Z axes. |
Reimplemented in gameplay::PhysicsFixedConstraint.
Sets the upper linear limits along the constraint's local X, Y, and Z axes using the values in the given vector.
- Parameters:
-
| limits | The upper linear limits along the local X, Y, and Z axes. |
Reimplemented in gameplay::PhysicsFixedConstraint.
Sets the rotation offset for the first rigid body in the constraint.
- Parameters:
-
| rotationOffset | The rotation offset. |
Sets the rotation offset for the second rigid body in the constraint.
- Parameters:
-
| rotationOffset | The rotation offset. |
Sets the translation offset for the first rigid body in the constraint.
- Parameters:
-
| translationOffset | The translation offset. |
Sets the translation offset for the second rigid body in the constraint.
- Parameters:
-
| translationOffset | The translation offset. |
 1.7.6.1
1.7.6.1

