 |
Eigen-unsupported
3.2.7
|


|
|
Eigen-unsupported
3.2.7
|
|
iterative scaling algorithm to equilibrate rows and column norms in matrices More...
Classes | |
| class | AlignedVector3 |
| A vectorization friendly 3D vector. More... | |
| class | AutoDiffScalar |
| A scalar type replacement with automatic differentation capability. More... | |
| class | BDCSVD |
| class Bidiagonal Divide and Conquer SVD More... | |
| class | DGMRES |
| A Restarted GMRES with deflation. This class implements a modification of the GMRES solver for sparse linear systems. The basis is built with modified Gram-Schmidt. At each restart, a few approximated eigenvectors corresponding to the smallest eigenvalues are used to build a preconditioner for the next cycle. This preconditioner for deflation can be combined with any other preconditioner, the IncompleteLUT for instance. The preconditioner is applied at right of the matrix and the combination is multiplicative. More... | |
| class | DynamicSparseMatrix |
| A sparse matrix class designed for matrix assembly purpose. More... | |
| class | GMRES |
| A GMRES solver for sparse square problems. More... | |
| class | HybridNonLinearSolver |
| Finds a zero of a system of n nonlinear functions in n variables by a modification of the Powell hybrid method ("dogleg"). More... | |
| class | IncompleteCholesky |
| Modified Incomplete Cholesky with dual threshold. More... | |
| class | IterationController |
| Controls the iterations of the iterative solvers. More... | |
| class | JacobiSVD |
| Two-sided Jacobi SVD decomposition of a rectangular matrix. More... | |
| class | KdBVH |
| A simple bounding volume hierarchy based on AlignedBox. More... | |
| class | KroneckerProduct |
| Kronecker tensor product helper class for dense matrices. More... | |
| class | KroneckerProductSparse |
| Kronecker tensor product helper class for sparse matrices. More... | |
| class | LevenbergMarquardt |
| Performs non linear optimization over a non-linear function, using a variant of the Levenberg Marquardt algorithm. More... | |
| class | MatrixExponential |
| Class for computing the matrix exponential. More... | |
| struct | MatrixExponentialReturnValue |
| Proxy for the matrix exponential of some matrix (expression). More... | |
| class | MatrixFunction |
| Class for computing matrix functions. More... | |
| class | MatrixFunctionAtomic |
| Helper class for computing matrix functions of atomic matrices. More... | |
| class | MatrixFunctionReturnValue |
| Proxy for the matrix function of some matrix (expression). More... | |
| class | MatrixLogarithmAtomic |
| Helper class for computing matrix logarithm of atomic matrices. More... | |
| class | MatrixLogarithmReturnValue |
| Proxy for the matrix logarithm of some matrix (expression). More... | |
| class | MatrixMarketIterator |
| Iterator to browse matrices from a specified folder. More... | |
| class | MatrixPower |
| Class for computing matrix powers. More... | |
| class | MatrixPowerReturnValue |
| Proxy for the matrix power of some matrix (expression). More... | |
| class | MatrixSquareRoot |
| Class for computing matrix square roots of general matrices. More... | |
| class | MatrixSquareRootQuasiTriangular |
| Class for computing matrix square roots of upper quasi-triangular matrices. More... | |
| class | MatrixSquareRootReturnValue |
| Proxy for the matrix square root of some matrix (expression). More... | |
| class | MatrixSquareRootTriangular |
| Class for computing matrix square roots of upper triangular matrices. More... | |
| class | MINRES |
| A minimal residual solver for sparse symmetric problems. More... | |
| class | NumericalDiff |
| class | PolynomialSolver |
| A polynomial solver. More... | |
| class | PolynomialSolverBase |
| Defined to be inherited by polynomial solvers: it provides convenient methods such as. More... | |
| class | RandomSetter |
| The RandomSetter is a wrapper object allowing to set/update a sparse matrix with random access. More... | |
| class | SkylineInplaceLU |
| Inplace LU decomposition of a skyline matrix and associated features. More... | |
| class | SkylineMatrix |
| The main skyline matrix class. More... | |
| class | SkylineMatrixBase |
| Base class of any skyline matrices or skyline expressions. More... | |
| class | SkylineStorage |
| class | Spline |
| A class representing multi-dimensional spline curves. More... | |
| struct | SplineFitting |
| Spline fitting methods. More... | |
| struct | SplineTraits< Spline< _Scalar, _Dim, _Degree >, _DerivativeOrder > |
| Compile-time attributes of the Spline class for fixed degree. More... | |
| struct | SplineTraits< Spline< _Scalar, _Dim, _Degree >, Dynamic > |
| Compile-time attributes of the Spline class for Dynamic degree. More... | |
| struct | StdMapTraits |
| class | StdStemFunctions |
| Stem functions corresponding to standard mathematical functions. More... | |
| class | SVDBase |
| Mother class of SVD classes algorithms. More... | |
Typedefs | |
| typedef Spline< double, 2 > | Spline2d |
| 2D double B-spline with dynamic degree. | |
| typedef Spline< float, 2 > | Spline2f |
| 2D float B-spline with dynamic degree. | |
| typedef Spline< double, 3 > | Spline3d |
| 3D double B-spline with dynamic degree. | |
| typedef Spline< float, 3 > | Spline3f |
| 3D float B-spline with dynamic degree. | |
Functions | |
| template<typename BVH , typename Intersector > | |
| void | BVIntersect (const BVH &tree, Intersector &intersector) |
| template<typename BVH1 , typename BVH2 , typename Intersector > | |
| void | BVIntersect (const BVH1 &tree1, const BVH2 &tree2, Intersector &intersector) |
| template<typename BVH , typename Minimizer > | |
| Minimizer::Scalar | BVMinimize (const BVH &tree, Minimizer &minimizer) |
| template<typename BVH1 , typename BVH2 , typename Minimizer > | |
| Minimizer::Scalar | BVMinimize (const BVH1 &tree1, const BVH2 &tree2, Minimizer &minimizer) |
| template<typename Polynomial > | |
| NumTraits< typename Polynomial::Scalar >::Real | cauchy_max_bound (const Polynomial &poly) |
| template<typename Polynomial > | |
| NumTraits< typename Polynomial::Scalar >::Real | cauchy_min_bound (const Polynomial &poly) |
| template<typename PointArrayType , typename KnotVectorType > | |
| void | ChordLengths (const PointArrayType &pts, KnotVectorType &chord_lengths) |
| Computes chord length parameters which are required for spline interpolation. More... | |
| template<typename KnotVectorType > | |
| void | KnotAveraging (const KnotVectorType ¶meters, DenseIndex degree, KnotVectorType &knots) |
| Computes knot averages.The knots are computed as
where | |
| template<typename A , typename B > | |
| KroneckerProduct< A, B > | kroneckerProduct (const MatrixBase< A > &a, const MatrixBase< B > &b) |
| template<typename A , typename B > | |
| KroneckerProductSparse< A, B > | kroneckerProduct (const EigenBase< A > &a, const EigenBase< B > &b) |
| template<typename Polynomials , typename T > | |
| T | poly_eval (const Polynomials &poly, const T &x) |
| template<typename Polynomials , typename T > | |
| T | poly_eval_horner (const Polynomials &poly, const T &x) |
| template<typename RootVector , typename Polynomial > | |
| void | roots_to_monicPolynomial (const RootVector &rv, Polynomial &poly) |
iterative scaling algorithm to equilibrate rows and column norms in matrices
This class can be used as a preprocessing tool to accelerate the convergence of iterative methods
This feature is useful to limit the pivoting amount during LU/ILU factorization The scaling strategy as presented here preserves the symmetry of the problem NOTE It is assumed that the matrix does not have empty row or column,
Example with key steps
| _MatrixType | the type of the matrix. It should be a real square sparsematrix |
References : D. Ruiz and B. Ucar, A Symmetry Preserving Algorithm for Matrix Scaling, INRIA Research report RR-7552
| void Eigen::BVIntersect | ( | const BVH & | tree, |
| Intersector & | intersector | ||
| ) |
Given a BVH, runs the query encapsulated by intersector. The Intersector type must provide the following members:
| void Eigen::BVIntersect | ( | const BVH1 & | tree1, |
| const BVH2 & | tree2, | ||
| Intersector & | intersector | ||
| ) |
Given two BVH's, runs the query on their Cartesian product encapsulated by intersector. The Intersector type must provide the following members:
| Minimizer::Scalar Eigen::BVMinimize | ( | const BVH & | tree, |
| Minimizer & | minimizer | ||
| ) |
Given a BVH, runs the query encapsulated by minimizer.
| Minimizer::Scalar Eigen::BVMinimize | ( | const BVH1 & | tree1, |
| const BVH2 & | tree2, | ||
| Minimizer & | minimizer | ||
| ) |
Given two BVH's, runs the query on their cartesian product encapsulated by minimizer.
 1.8.5
1.8.5 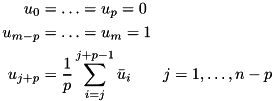
 is the degree and
is the degree and  the number knots of the desired interpolating spline.
the number knots of the desired interpolating spline.