Air quality sensor project
Setting up source tree for stuff you need
To start with, you need to create a new project under which you will do this development. So you type in:
$ mkdir $HOME/src
$ cd $HOME/src
$ newt new air_quality
Let's say you are using Arduino Primo -- which is based on the Nordic Semi NRF52 chip -- as the platform. You know you need the board support package for that hardware. You can look up its location, add it your project, and fetch that along with the core OS components. Luckily, the Arduino Primo is supported in the Mynewt Core, so there's nothing much to do here.
Your project.yml file should look like this:
[user@IsMyLaptop:~/src/air_quality]$ emacs project.yml &
[user@IsMyLaptop:~/src/air_quality]$ cat project.yml
project.name: "air_quality"
project.repositories:
- apache-mynewt-core
# Use github's distribution mechanism for core ASF libraries.
# This provides mirroring automatically for us.
#
repository.apache-mynewt-core:
type: github
vers: 0-latest
user: apache
repo: incubator-mynewt-core
[user@IsMyLaptop:~/src/air_quality]$ newt install
apache-mynewt-core
[user@IsMyLaptop:~/src/air_quality]$ ls repos/
apache-mynewt-core
Good. You want to make sure you have all the needed bits for supporting your board; so you decide to build the blinky project for the platform first.
Now create a target for it and build it. Easiest way to proceed is to copy the existing target for blinky, and modify it to build for Arduino Primo board.
[user@IsMyLaptop:~/src/air_quality]$ newt target copy my_blinky_sim blink_primo Target successfully copied; targets/my_blinky_sim --> targets/blink_primo [user@IsMyLaptop:~/src/air_quality]$ newt target set blink_primo bsp=@apache-mynewt-core/hw/bsp/arduino_primo_nrf52 Target targets/blink_nrf successfully set target.bsp to @apache-mynewt-core/hw/bsp/arduino_primo_nrf52 [user@IsMyLaptop:~/src/air_quality]$ newt build blink_primo Compiling hal_bsp.c ... Linking blinky.elf App successfully built: /Users/user/src/air_quality/bin/blink_primo/apps/blinky/blinky.elf
Good.
You know that this platform uses bootloader, which means you have to create a target for that too.
[user@IsMyLaptop:~/src/air_quality]$ newt target create boot_primo
Target targets/boot_nrf successfully created
[user@IsMyLaptop:~/src/air_quality]$ newt target show
@apache-mynewt-core/targets/unittest
bsp=hw/bsp/native
build_profile=debug
compiler=compiler/sim
targets/blink_primo
app=apps/blinky
bsp=@apache-mynewt-core/hw/bsp/arduino_primo_nrf52
build_profile=debug
targets/boot_primo
targets/my_blinky_sim
app=apps/blinky
bsp=@apache-mynewt-core/hw/bsp/native
build_profile=debug
[user@IsMyLaptop:~/src/air_quality]$ newt target set boot_nrf bsp=@apache-mynewt-core/hw/bsp/arduino_primo_nrf52
Target targets/boot_nrf successfully set target.bsp to @apache-mynewt-core/hw/bsp/arduino_primo_nrf52
[user@IsMyLaptop:~/src/air_quality]$ newt target set boot_nrf app=@apache-mynewt-core/apps/boot
Target targets/boot_nrf successfully set target.app to @apache-mynewt-core/apps/boot
[user@IsMyLaptop:~/src/air_quality]$ newt target set boot_nrf build_profile=optimized
Target targets/boot_nrf successfully set target.build_profile to optimized
And then build it, and load it onto the board.
newt build boot_primo .... Linking boot.elf App successfully built: /Users/user/src/air_quality/bin/boot_primo/apps/boot/boot.elf [user@IsMyLaptop:~/src/air_quality] $ newt load boot_primo
At this point, you may (or may not) see a bunch of error messages about not being able to connect to your board, not being able to load the image, etc. If that's the case, and you haven't already, you should most definitely go worth through the blinky_primo tutorial so that you can properly communicate with your board.
Next you must download the targets to board, and see that the LED actually blinks. You plug in the Arduino Primo board to your laptop, and say:
[user@IsMyLaptop:~/src/air_quality]$ newt load blink_primo Loading app image into slot 1 Error: couldn't open /Users/user/src/air_quality/bin/blink_primo/apps/blinky/blinky.img Error: exit status 1 load - Load app image to target for <target-name>. Usage: newt load [flags] Examples: newt load <target-name> Global Flags: -l, --loglevel string Log level, defaults to WARN. (default "WARN") -o, --outfile string Filename to tee log output to -q, --quiet Be quiet; only display error output. -s, --silent Be silent; don't output anything. -v, --verbose Enable verbose output when executing commands. exit status 1
Ah. Forgot to create an image out of the blinky binary. Note that every time you want to build and load a new firmware image to a target board, you need to run 'create-image' on it.
[user@IsMyLaptop:~/src/air_quality]$ newt create-image blink_primo 0.0.1 App image successfully generated: /Users/user/src/air_quality/bin/blink_primo/apps/blinky/blinky.img Build manifest: /Users/user/src/air_quality/bin/blink_nrf/apps/blinky/manifest.json [user@IsMyLaptop:~/src/air_quality]$ newt load blink_primo
And it's blinking.
Shortcut for doing build/create-image/load/debug steps all in one is 'newt run' command. Check out the usage from command line help.
Create test project
Now that you have your system setup, you can start creating your own stuff.
First you want to create a project for yourself - you could start by using blinky as a project
template, but since we're going to want to be able to access the data via Bluetooth, let's
use the bleprph Bluetooth Peripheral project instead.
[user@IsMyLaptop:~/src/air_quality]$ mkdir apps/air_quality
[user@IsMyLaptop:~/src/air_quality]$ cp repos/apache-mynewt-core/apps/bleprph/pkg.yml apps/air_quality/
[user@IsMyLaptop:~/src/air_quality]$ cp -Rp repos/apache-mynewt-core/apps/bleprph/src apps/air_quality/
Then you modify the apps/air_quality/pkg.yml for air_quality in order to change the pkg.name to be apps/air_quality.
You'll need to add the @apache-mynewt-core/ path to all the package dependencies, since the app no longer
resides within the apache-mynewt-core repository.
[user@IsMyLaptop:~/src/air_quality]$ cat apps/air_quality/pkg.yml pkg.name: apps/air_quality pkg.type: app pkg.description: BLE Air Quality application. pkg.author: "Apache Mynewt <[email protected]>" pkg.homepage: "http://mynewt.apache.org/" pkg.keywords: pkg.deps: - "@apache-mynewt-core/kernel/os" - "@apache-mynewt-core/sys/shell" - "@apache-mynewt-core/sys/stats/full" - "@apache-mynewt-core/sys/log/full" - "@apache-mynewt-core/mgmt/newtmgr" - "@apache-mynewt-core/mgmt/newtmgr/transport/ble" - "@apache-mynewt-core/net/nimble/controller" - "@apache-mynewt-core/net/nimble/host" - "@apache-mynewt-core/net/nimble/host/services/ans" - "@apache-mynewt-core/net/nimble/host/services/gap" - "@apache-mynewt-core/net/nimble/host/services/gatt" - "@apache-mynewt-core/net/nimble/host/store/ram" - "@apache-mynewt-core/net/nimble/transport/ram" - "@apache-mynewt-core/sys/console/full" - "@apache-mynewt-core/sys/sysinit" - "@apache-mynewt-core/sys/id"
And create a target for it:
[user@IsMyLaptop:~/src/air_quality]$ newt target create air_q Target targets/air_q successfully created [user@IsMyLaptop:~/src/air_quality]$ newt target set air_q bsp=@apache-mynewt-core/hw/bsp/arduino_primo_nrf52 Target targets/air_q successfully set target.bsp to @apache-mynewt-core/hw/bsp/arduino_primo_nrf52 [user@IsMyLaptop:~/src/air_quality]$ newt target set air_q app=apps/air_quality Target targets/air_q successfully set target.app to apps/air_quality [user@IsMyLaptop:~/src/air_quality]$ newt target set air_q build_profile=debug Target targets/air_q successfully set target.build_profile to debug [user@IsMyLaptop:~/src/air_quality]$ newt build air_q .... Linking /Users/dsimmons/dev/myproj/bin/targets/air_q/app/apps/air_quality/air_quality.elf Target successfully built: targets/air_q
Create packages for drivers
One of the sensors you want to enable is SenseAir K30, which will connect to the board over a serial port. To start development of the driver, you first need to create a package description for it, and add stubs for sources.
The first thing to do is to create the directory structure for your driver:
[user@IsMyLaptop:~/src/air_quality]$ mkdir -p libs/my_drivers/senseair/include/senseair [user@IsMyLaptop:~/src/air_quality]$ mkdir -p libs/my_drivers/senseair/src
Now you can add the files you need. You'll need a pkg.yml to describe the driver, and then header stub followed by source stub.
[user@IsMyLaptop:~/src/air_quality]$ cat libs/my_drivers/senseair/pkg.yml
# # Licensed to the Apache Software Foundation (ASF) under one # or more contributor license agreements. See the NOTICE file # distributed with this work for additional information # regarding copyright ownership. The ASF licenses this file # to you under the Apache License, Version 2.0 (the # "License"); you may not use this file except in compliance # with the License. You may obtain a copy of the License at # # http://www.apache.org/licenses/LICENSE-2.0 # # Unless required by applicable law or agreed to in writing, # software distributed under the License is distributed on an # "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY # KIND, either express or implied. See the License for the # specific language governing permissions and limitations # under the License. # pkg.name: libs/my_drivers/senseair pkg.description: Host side of the nimble Bluetooth Smart stack. pkg.author: "Apache Mynewt <[email protected]>" pkg.homepage: "http://mynewt.apache.org/" pkg.keywords: - ble - bluetooth pkg.deps: - "@apache-mynewt-core/kernel/os"
[user@IsMyLaptop:~/src/air_quality]$ cat libs/my_drivers/senseair/include/senseair/senseair.h
/* * Licensed to the Apache Software Foundation (ASF) under one * or more contributor license agreements. See the NOTICE file * distributed with this work for additional information * regarding copyright ownership. The ASF licenses this file * to you under the Apache License, Version 2.0 (the * "License"); you may not use this file except in compliance * with the License. You may obtain a copy of the License at * * http://www.apache.org/licenses/LICENSE-2.0 * * Unless required by applicable law or agreed to in writing, * software distributed under the License is distributed on an * "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY * KIND, either express or implied. See the License for the * specific language governing permissions and limitations * under the License. */ #ifndef _SENSEAIR_H_ #define _SENSEAIR_H_ void senseair_init(void); #endif /* _SENSEAIR_H_ */
[user@IsMyLaptop:~/src/air_quality]$ cat libs/my_drivers/senseair/src/senseair.c
/** * Licensed to the Apache Software Foundation (ASF) under one * or more contributor license agreements. See the NOTICE file * distributed with this work for additional information * regarding copyright ownership. The ASF licenses this file * to you under the Apache License, Version 2.0 (the * "License"); you may not use this file except in compliance * with the License. You may obtain a copy of the License at * * http://www.apache.org/licenses/LICENSE-2.0 * * Unless required by applicable law or agreed to in writing, * software distributed under the License is distributed on an * "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY * KIND, either express or implied. See the License for the * specific language governing permissions and limitations * under the License. */ void senseair_init(void) { }
And add dependency to this package in your project yml file.
Here's the listing from apps/air_quality/pkg.yml
pkg.name: apps/air_quality
pkg.type: app
pkg.description: Air quality sensor test
pkg.keywords:
pkg.deps:
- "@apache-mynewt-core/libs/console/full"
- "@apache-mynewt-core/libs/newtmgr"
- "@apache-mynewt-core/libs/os"
- "@apache-mynewt-core/libs/shell"
- "@apache-mynewt-core/sys/config"
- "@apache-mynewt-core/sys/log/full"
- "@apache-mynewt-core/sys/stats/full"
- libs/my_drivers/senseair
And add a call to your main() to initialize this driver.
[user@IsMyLaptop:~/src/air_quality]$ diff project/blinky/src/main.c project/air_quality/src/main.c
28a29
> #include <senseair/senseair.h>
190a192
> senseair_init();
[user@IsMyLaptop:~/src/air_quality
The ble_prph app runs everything in one task handler. For this project, we're going to add a second task handler to respond to the shell, and then handle communicating with the senseair sensor for us.
/** shell task settings. */ #define SHELL_TASK_PRIO 2 #define SHELL_STACK_SIZE (OS_STACK_ALIGN(336)) struct os_eventq shell_evq; struct os_task shell_task; bssnz_t os_stack_t shell_stack[SHELL_STACK_SIZE];
That defines the task, now we need to initialize it, add a task handler, and we're going to use this task as our default task handler.
/** * Event loop for the main shell task. */ static void shell_task_handler(void *unused) { while (1) { os_eventq_run(&shell_evq); } }
And in your main() add:
/* Initialize shell eventq */ os_eventq_init(&shell_evq); /* Create the shell task. * All shell operations are performed in this task. */ os_task_init(&shell_task, "shell", shell_task_handler, NULL, SHELL_TASK_PRIO, OS_WAIT_FOREVER, shell_stack, SHELL_STACK_SIZE);
Don't forget to change your default task handler!
os_eventq_dflt_set(&shell_evq);
And then build it to make sure all goes well.
[user@IsMyLaptop:~/src/air_quality]$ newt build air_q Compiling senseair.c Archiving senseair.a Linking air_quality.elf App successfully built: /Users/user/src/air_quality/bin/air_q/apps/air_quality/air_quality.elf
All looks good.
Add CLI commands for testing drivers
While developing the driver, you want to issue operations from console asking it to do stuff. We'll assume that you've already worked through the tutorial
on how to enable the CLI, so all we'll need to do is add the propper values to the project's syscfg.yml file:
[user@IsMyLaptop:~/src/air_quality]$ cat targets/air_q/syscfg.yml
syscfg.vals:
# Set as per blinky_primo
OPENOCD_DEBUG: 1
# Enable the shell task.
SHELL_TASK: 1
STATS_CLI: 1
CONSOLE_TICKS: 1
CONSOLE_PROMPT: 1
Then register your senseair command with the shell by adding the following to libs/my_drivers/senseair/src/senseair.c
#include <shell/shell.h> #include <console/console.h> #include <assert.h> static int senseair_shell_func(int argc, char **argv); static struct shell_cmd senseair_cmd = { .sc_cmd = "senseair", .sc_cmd_func = senseair_shell_func, }; void senseair_init(void) { int rc; rc = shell_cmd_register(&senseair_cmd); assert(rc == 0); } static int senseair_shell_func(int argc, char **argv) { console_printf("Yay! Somebody called!\n"); return 0; }
Now you can you build this, download to target, and start minicom on your console port. If you haven't already, familiarize yourself with the tutorial on how to connect a serial port to your board here.
You'll need to wire up your Board to a Serial converter first. On the Arduino Primo Board pin 1 is TX and pin 0 is RX so wire 1 to RX on your serial board, and 0 to TX on your serial board.
[user@IsMyLaptop:~]$ minicom -D /dev/tty.usbserial-AH02MIE2
Welcome to minicom 2.7
OPTIONS:
Compiled on Oct 12 2015, 07:48:30.
Port /dev/tty.usbserial-AH02MIE2, 13:44:40
Press CTRL-X Z for help on special keys
?
419: > ?
Commands:
641: stat echo ? prompt ticks tasks
643: mempools date senseair
644: > senseair
Yay! Somebody called!
1125: >
53611: > tasks
Tasks:
54047: task pri tid runtime csw stksz stkuse lcheck ncheck flg
54057: idle 255 0 54048 66890 64 30 0 0 0
54068: ble_ll 0 1 9 64986 80 58 0 0 0
54079: bleprph 1 2 0 1 336 32 0 0 0
54090: shell 2 3 0 2077 336 262 0 0 0
54101: >
That's great. Your shell task is running, and is responding appropriately! You can connect the hardware to your board and start developing code for the driver itself.
Use of HAL for drivers
The sensor has a serial port connection, and that's how you are going to connect to it. Your original BSP, hw/bsp/arduino_primo_nrf52, has two UARTs set up. We're using one for our shell/console. It also has a second UART set up as a 'bit-bang' UART but since the SenseAir only needs to communicate at 9600 baud, this bit-banged uart is plenty fast enough.
You'll have to make a small change to the syscfg.yml file in your project's target directory to change the pin definitions
for this second UART. Those changes are as follows:
UART_0_PIN_TX: 23
UART_0_PIN_RX: 24
With this in place, you can refer to serial port where your SenseAir sensor by a logical number. This makes the code more platform independent - you could connect this sensor to another board, like Olimex. You will also use the HAL UART abstraction to do the UART port setup and data transfer. That way you don't need to have any platform dependent pieces within your little driver.
You will now see what the driver code ends up looking like. Here's the header file, filled in from the stub you created earlier.
/* * Licensed to the Apache Software Foundation (ASF) under one * or more contributor license agreements. See the NOTICE file * distributed with this work for additional information * regarding copyright ownership. The ASF licenses this file * to you under the Apache License, Version 2.0 (the * "License"); you may not use this file except in compliance * with the License. You may obtain a copy of the License at * * http://www.apache.org/licenses/LICENSE-2.0 * * Unless required by applicable law or agreed to in writing, * software distributed under the License is distributed on an * "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY * KIND, either express or implied. See the License for the * specific language governing permissions and limitations * under the License. */ #ifndef _SENSEAIR_H_ #define _SENSEAIR_H_ enum senseair_read_type { SENSEAIR_CO2, }; int senseair_init(int uartno); int senseair_read(enum senseair_read_type); #endif /* _SENSEAIR_H_ */
As you can see, logical UART number has been added to the init routine. A 'read' function has been added, which is a blocking read. If you were making a commercial product, you would probably have a callback for reporting the results.
And here is the source for the driver.
/** * Licensed to the Apache Software Foundation (ASF) under one * or more contributor license agreements. See the NOTICE file * distributed with this work for additional information * regarding copyright ownership. The ASF licenses this file * to you under the Apache License, Version 2.0 (the * "License"); you may not use this file except in compliance * with the License. You may obtain a copy of the License at * * http://www.apache.org/licenses/LICENSE-2.0 * * Unless required by applicable law or agreed to in writing, * software distributed under the License is distributed on an * "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY * KIND, either express or implied. See the License for the * specific language governing permissions and limitations * under the License. */ #include <string.h> #include <shell/shell.h> #include <console/console.h> #include <os/os.h> #include <hal/hal_uart.h> #include "senseair/senseair.h" static const uint8_t cmd_read_co2[] = { 0xFE, 0X44, 0X00, 0X08, 0X02, 0X9F, 0X25 }; static int senseair_shell_func(int argc, char **argv); static struct shell_cmd senseair_cmd = { .sc_cmd = "senseair", .sc_cmd_func = senseair_shell_func, }; struct senseair { int uart; struct os_sem sema; const uint8_t *tx_data; int tx_off; int tx_len; uint8_t rx_data[32]; int rx_off; int value; } senseair; static int senseair_tx_char(void *arg) { struct senseair *s = &senseair; int rc; if (s->tx_off >= s->tx_len) { /* * Command tx finished. */ s->tx_data = NULL; return -1; } rc = s->tx_data[s->tx_off]; s->tx_off++; return rc; } /* * CRC for modbus over serial port. */ static const uint16_t mb_crc_tbl[] = { 0x0000, 0xcc01, 0xd801, 0x1400, 0xf001, 0x3c00, 0x2800, 0xe401, 0xa001, 0x6c00, 0x7800, 0xb401, 0x5000, 0x9c01, 0x8801, 0x4400 }; static uint16_t mb_crc(const uint8_t *data, int len, uint16_t crc) { while (len-- > 0) { crc ^= *data++; crc = (crc >> 4) ^ mb_crc_tbl[crc & 0xf]; crc = (crc >> 4) ^ mb_crc_tbl[crc & 0xf]; } return crc; } static int mb_crc_check(const void *pkt, int len) { uint16_t crc, cmp; uint8_t *bp = (uint8_t *)pkt; if (len < sizeof(crc) + 1) { return -1; } crc = mb_crc(pkt, len - 2, 0xffff); cmp = bp[len - 2] | (bp[len - 1] << 8); if (crc != cmp) { return -1; } else { return 0; } } static int senseair_rx_char(void *arg, uint8_t data) { struct senseair *s = (struct senseair *)arg; int rc; if (s->rx_off >= sizeof(s->rx_data)) { s->rx_off = 0; } s->rx_data[s->rx_off] = data; s->rx_off++; if (s->rx_off == 7) { rc = mb_crc_check(s->rx_data, s->rx_off); if (rc == 0) { s->value = s->rx_data[3] * 256 + s->rx_data[4]; os_sem_release(&s->sema); } } return 0; } void senseair_tx(struct senseair *s, const uint8_t *tx_data, int data_len) { s->tx_data = tx_data; s->tx_len = data_len; s->tx_off = 0; s->rx_off = 0; hal_uart_start_tx(s->uart); } int senseair_read(enum senseair_read_type type) { struct senseair *s = &senseair; const uint8_t *cmd; int cmd_len; int rc; if (s->tx_data) { /* * busy */ return -1; } switch (type) { case SENSEAIR_CO2: cmd = cmd_read_co2; cmd_len = sizeof(cmd_read_co2); break; default: return -1; } senseair_tx(s, cmd, cmd_len); rc = os_sem_pend(&s->sema, OS_TICKS_PER_SEC / 2); if (rc == OS_TIMEOUT) { /* * timeout */ return -2; } return s->value; } static int senseair_shell_func(int argc, char **argv) { int value; enum senseair_read_type type; if (argc < 2) { usage: console_printf("%s co2\n", argv[0]); return 0; } if (!strcmp(argv[1], "co2")) { type = SENSEAIR_CO2; } else { goto usage; } value = senseair_read(type); if (value >= 0) { console_printf("Got %d\n", value); } else { console_printf("Error while reading: %d\n", value); } return 0; } int senseair_init(int uartno) { int rc; struct senseair *s = &senseair; rc = shell_cmd_register(&senseair_cmd); if (rc) { return rc; } rc = os_sem_init(&s->sema, 1); if (rc) { return rc; } rc = hal_uart_init_cbs(uartno, senseair_tx_char, NULL, senseair_rx_char, &senseair); if (rc) { return rc; } rc = hal_uart_config(uartno, 9600, 8, 1, HAL_UART_PARITY_NONE, HAL_UART_FLOW_CTL_NONE); if (rc) { return rc; } s->uart = uartno; return 0; }
And your modified main() for senseair driver init.
int main(int argc, char **argv) { .... senseair_init(0); .... }
You can see from the code that you are using the HAL interface to open a UART port, and using OS semaphore as a way of blocking the task when waiting for read response to come back from the sensor.
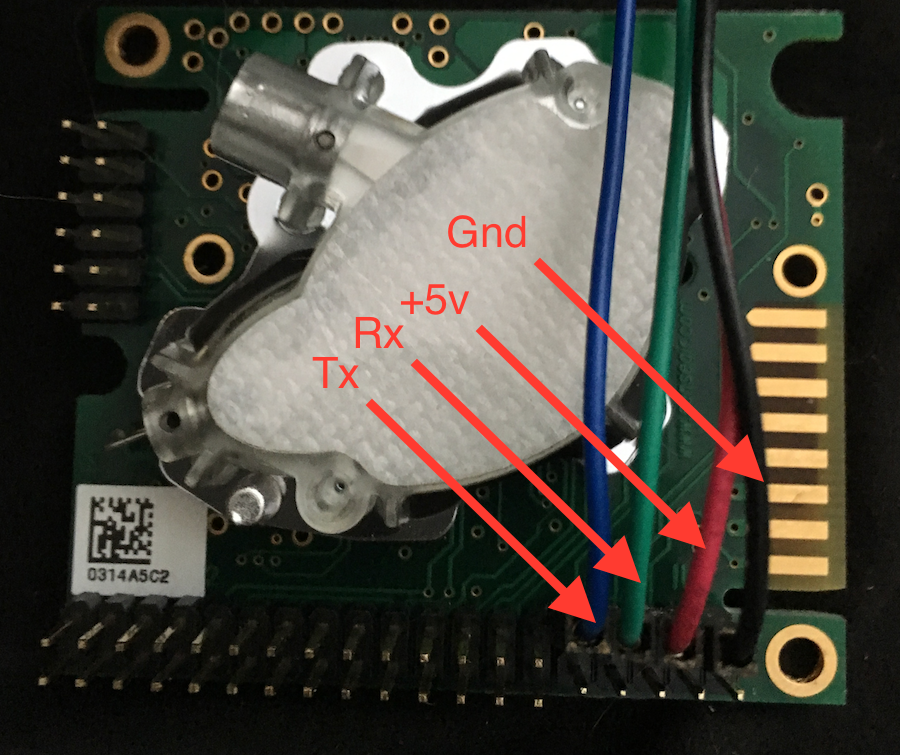
Now comes the fun part: Hooking up the sensor! It's fun because a) hooking up a sensor is always fun and b) the SenseAir sensor's PCB is entirely unlabeled, so you'll have to trust us on how to hook it up.
So here we go.
You'll have to do a little soldering. I soldered some header pins to the SenseAir K30 board to make connecting wires easier using standard jumper wires, but you can also just solder wires straight to the board if you prefer.
Here's what your SenseAir board should look like once it's wired up:
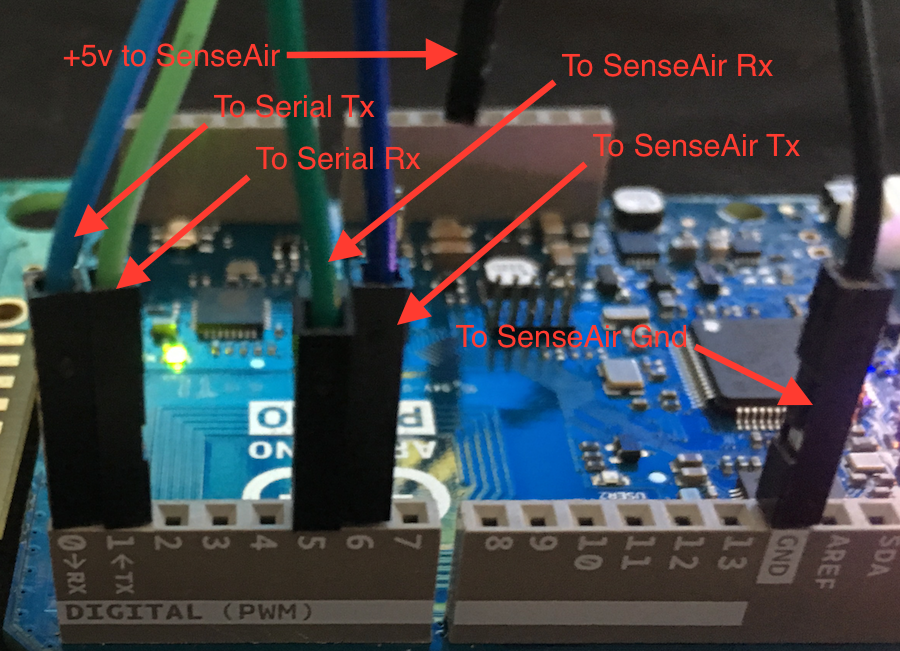
Now that you have that wired up, let's get the Arduino Primo wired up. A couple of things to note:
- The Arduino Primo's 'console' UART is actually UART1.
- The secondary (bit-banged) UART is UART0, so that's where we'll have to hook up the SenseAir.
Here's what your Arduino Primo should now look like with everything wired in:
Everything is wired and you're ready to go! Build and load your new app:
$ newt build air_q Building target targets/air_q Compiling apps/air_quality/src/main.c Archiving apps_air_quality.a Linking myproj/bin/targets/air_q/app/apps/air_quality/air_quality.elf Target successfully built: targets/air_q $ newt create-image air_q 1.0.0 App image succesfully generated: myproj/bin/targets/air_q/app/apps/air_quality/air_quality.img $ newt load air_q Loading app image into slot 1
Now, you should be able to connect to your serial port and read values:
user@IsMyLaptop:~]$ minicom -D /dev/tty.usbserial-AH02MIE2
Welcome to minicom 2.7
OPTIONS:
Compiled on Oct 12 2015, 07:48:30.
Port /dev/tty.usbserial-AH02MIE2, 13:44:40
Press CTRL-X Z for help on special keys
1185: > ?
Commands:
1382: stat echo ? prompt ticks tasks
1390: mempools date senseair
1395: > senseair
senseair co2
2143: > senseair co2
Got 973
And you're getting valid readings! Congratulations!
Next we'll hook this all up via Bluetooth so that you can read those values remotely.