|
TrinityCore
|
|
TrinityCore
|
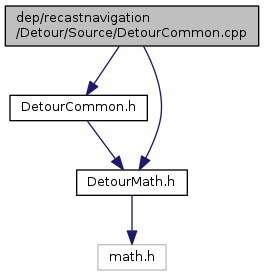
 Include dependency graph for DetourCommon.cpp:
Include dependency graph for DetourCommon.cpp:Functions | |
| void | dtClosestPtPointTriangle (float *closest, const float *p, const float *a, const float *b, const float *c) |
| bool | dtIntersectSegmentPoly2D (const float *p0, const float *p1, const float *verts, int nverts, float &tmin, float &tmax, int &segMin, int &segMax) |
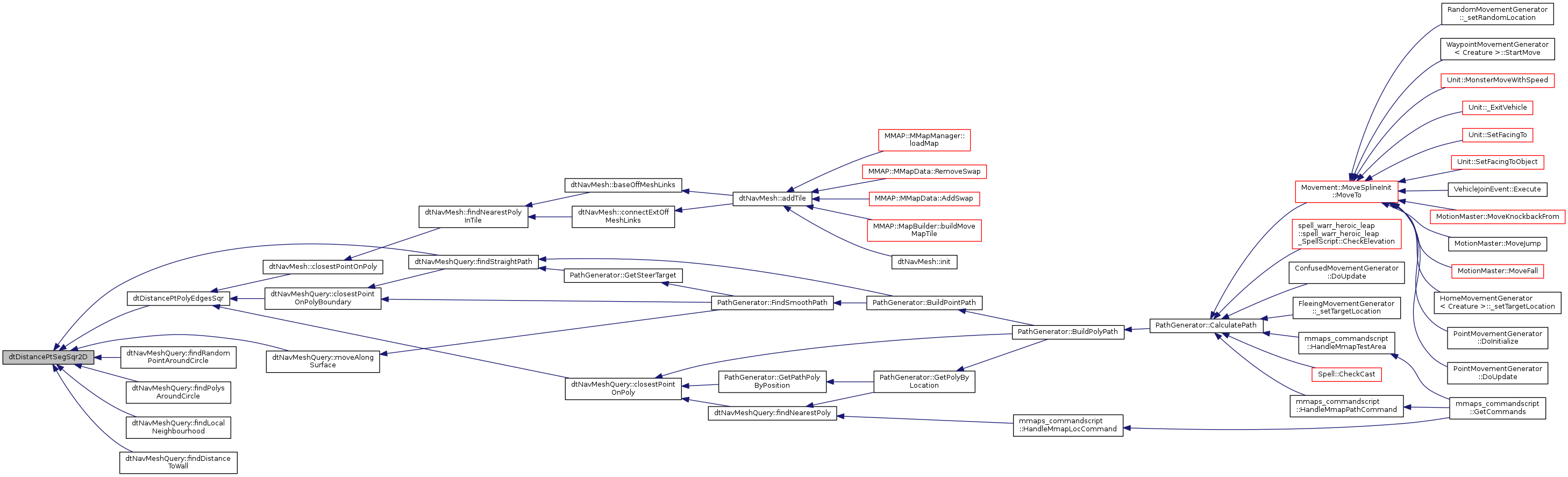
| float | dtDistancePtSegSqr2D (const float *pt, const float *p, const float *q, float &t) |
| void | dtCalcPolyCenter (float *tc, const unsigned short *idx, int nidx, const float *verts) |
| bool | dtClosestHeightPointTriangle (const float *p, const float *a, const float *b, const float *c, float &h) |
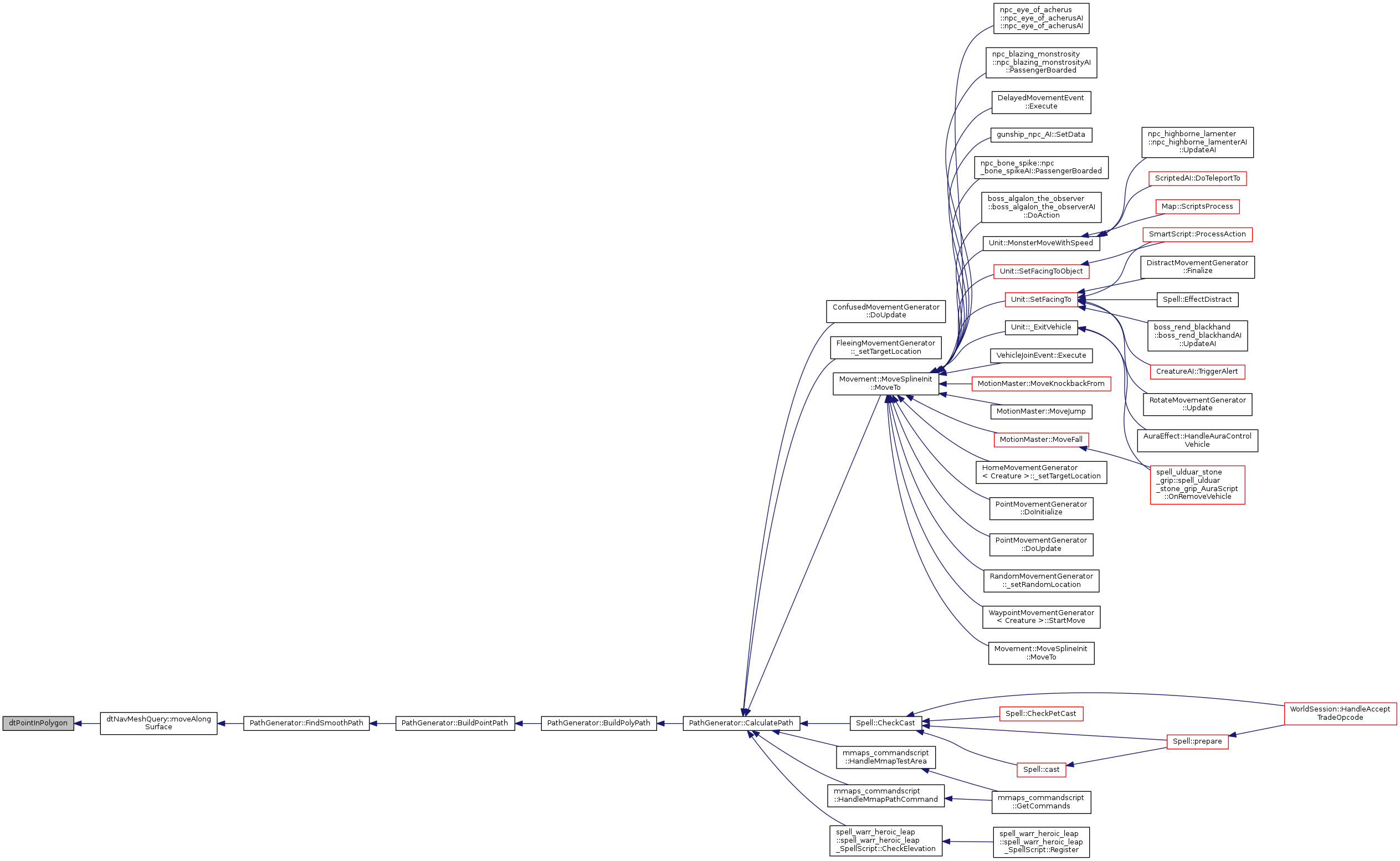
| bool | dtPointInPolygon (const float *pt, const float *verts, const int nverts) |
| bool | dtDistancePtPolyEdgesSqr (const float *pt, const float *verts, const int nverts, float *ed, float *et) |
| static void | projectPoly (const float *axis, const float *poly, const int npoly, float &rmin, float &rmax) |
| bool | overlapRange (const float amin, const float amax, const float bmin, const float bmax, const float eps) |
| bool | dtOverlapPolyPoly2D (const float *polya, const int npolya, const float *polyb, const int npolyb) |
| void | dtRandomPointInConvexPoly (const float *pts, const int npts, float *areas, const float s, const float t, float *out) |
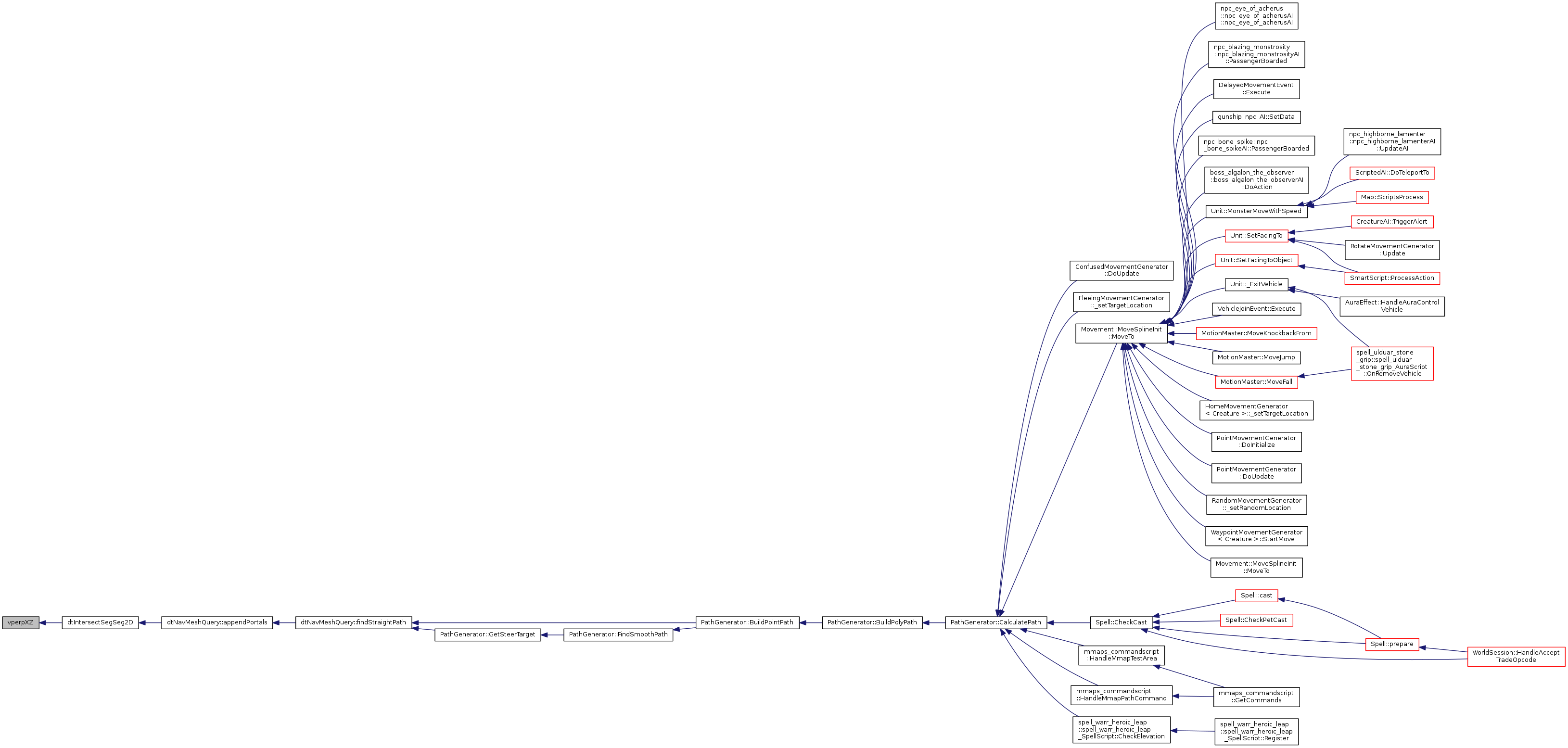
| float | vperpXZ (const float *a, const float *b) |
| bool | dtIntersectSegSeg2D (const float *ap, const float *aq, const float *bp, const float *bq, float &s, float &t) |
Derives the centroid of a convex polygon.
| [out] | tc | The centroid of the polgyon. [(x, y, z)] |
| [in] | idx | The polygon indices. [(vertIndex) * nidx] |
| [in] | nidx | The number of indices in the polygon. [Limit: >= 3] |
| [in] | verts | The polygon vertices. [(x, y, z) * vertCount] |
| bool dtClosestHeightPointTriangle | ( | const float * | p, |
| const float * | a, | ||
| const float * | b, | ||
| const float * | c, | ||
| float & | h | ||
| ) |
Derives the y-axis height of the closest point on the triangle from the specified reference point.
| [in] | p | The reference point from which to test. [(x, y, z)] |
| [in] | a | Vertex A of triangle ABC. [(x, y, z)] |
| [in] | b | Vertex B of triangle ABC. [(x, y, z)] |
| [in] | c | Vertex C of triangle ABC. [(x, y, z)] |
| [out] | h | The resulting height. |
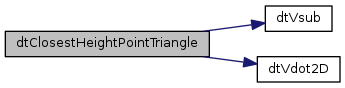
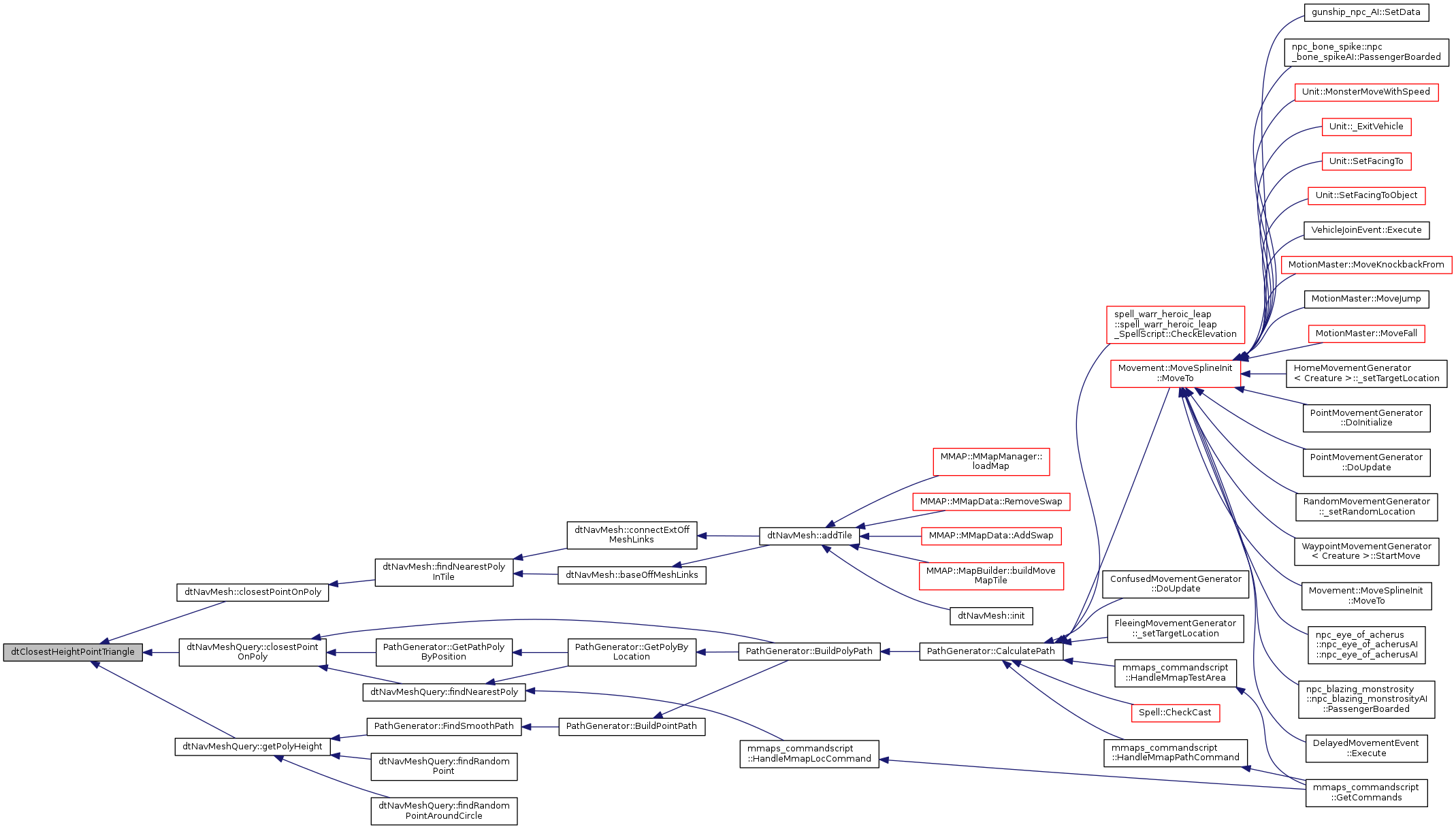
Here is the call graph for this function: Here is the caller graph for this function:| void dtClosestPtPointTriangle | ( | float * | closest, |
| const float * | p, | ||
| const float * | a, | ||
| const float * | b, | ||
| const float * | c | ||
| ) |
Derives the closest point on a triangle from the specified reference point.
| [out] | closest | The closest point on the triangle. |
| [in] | p | The reference point from which to test. [(x, y, z)] |
| [in] | a | Vertex A of triangle ABC. [(x, y, z)] |
| [in] | b | Vertex B of triangle ABC. [(x, y, z)] |
| [in] | c | Vertex C of triangle ABC. [(x, y, z)] |
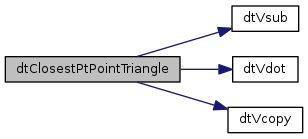
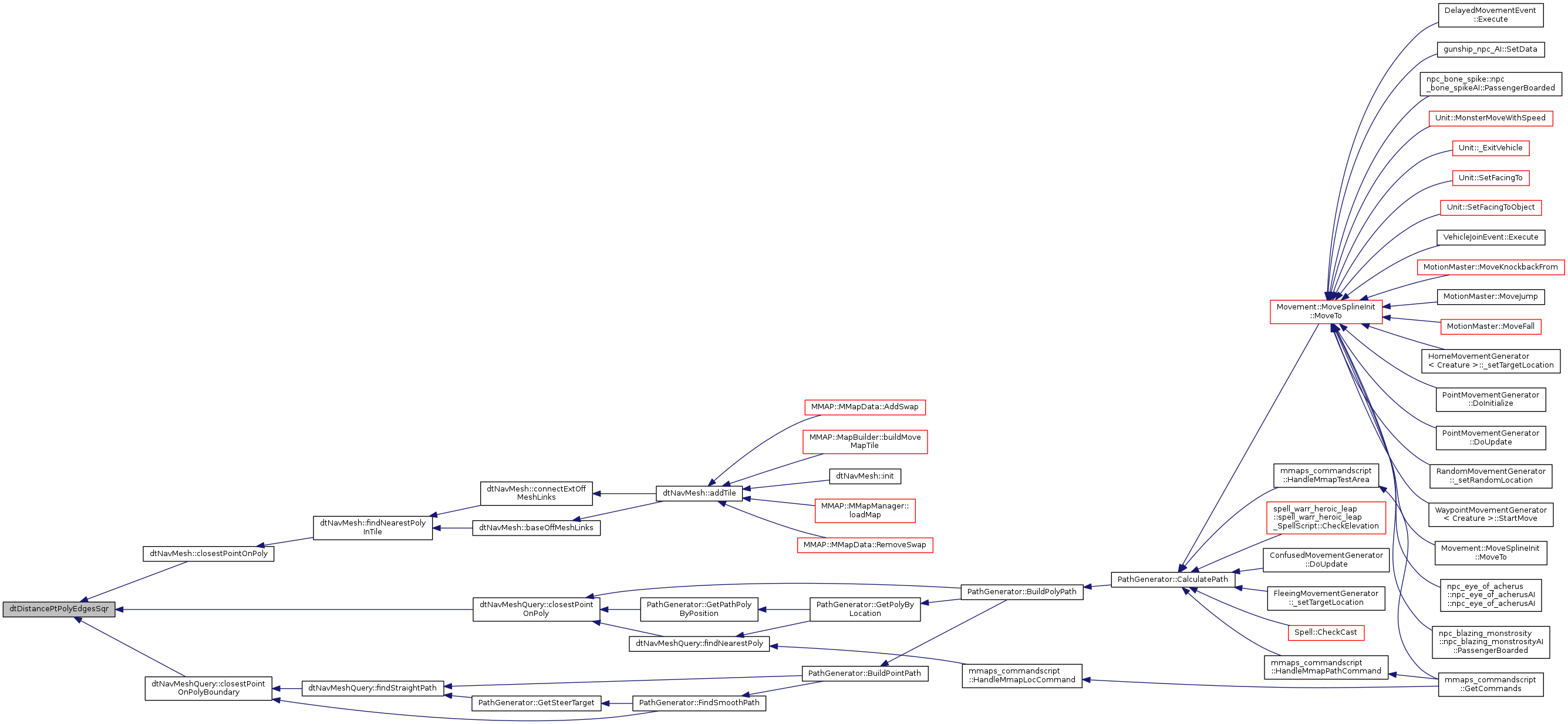
Here is the call graph for this function:| bool dtDistancePtPolyEdgesSqr | ( | const float * | pt, |
| const float * | verts, | ||
| const int | nverts, | ||
| float * | ed, | ||
| float * | et | ||
| ) |
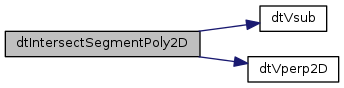
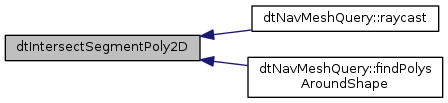
Here is the call graph for this function: Here is the caller graph for this function: Here is the caller graph for this function:| bool dtIntersectSegmentPoly2D | ( | const float * | p0, |
| const float * | p1, | ||
| const float * | verts, | ||
| int | nverts, | ||
| float & | tmin, | ||
| float & | tmax, | ||
| int & | segMin, | ||
| int & | segMax | ||
| ) |
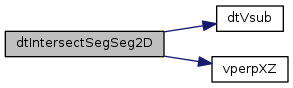
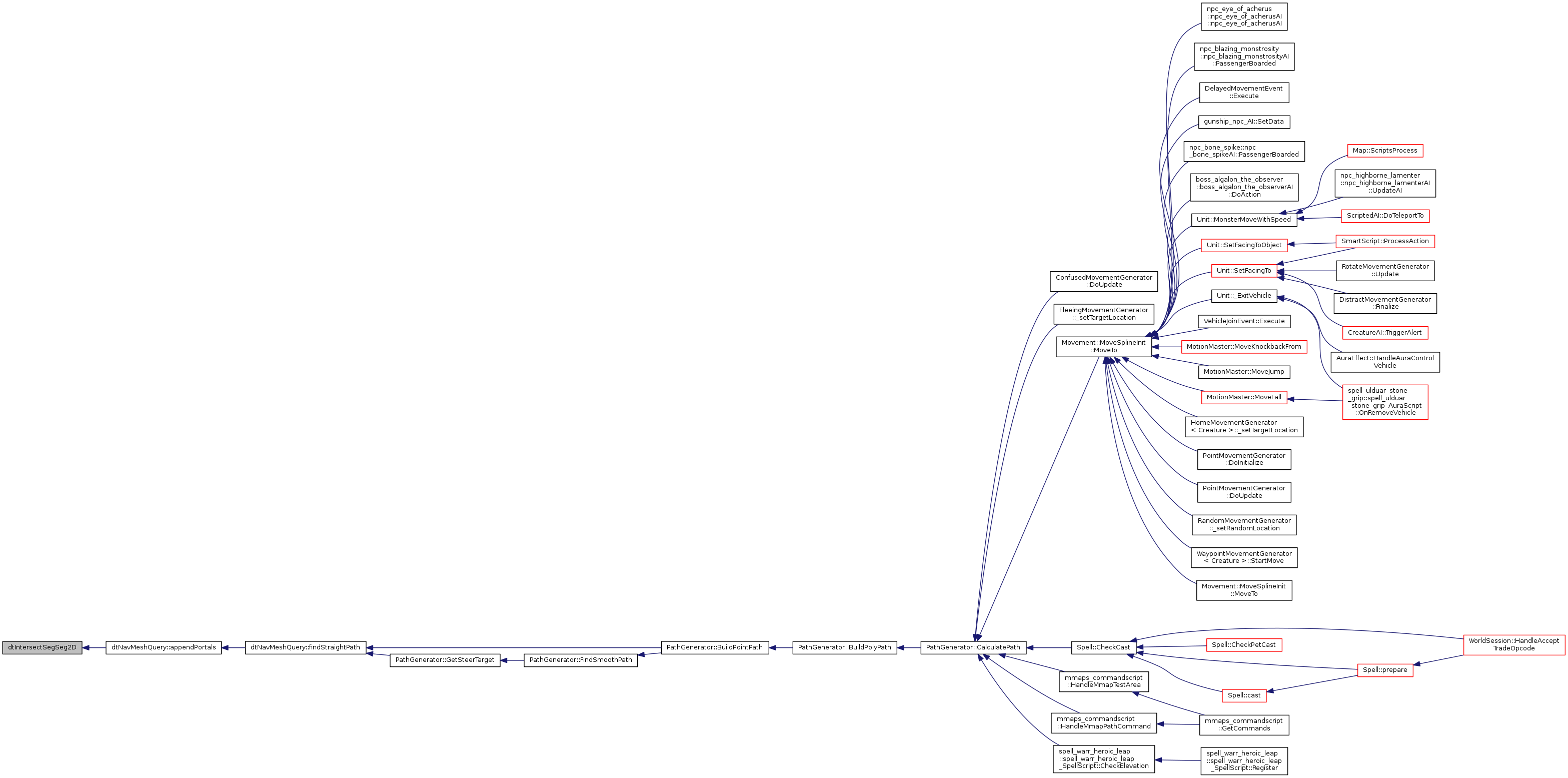
Here is the call graph for this function: Here is the caller graph for this function:| bool dtIntersectSegSeg2D | ( | const float * | ap, |
| const float * | aq, | ||
| const float * | bp, | ||
| const float * | bq, | ||
| float & | s, | ||
| float & | t | ||
| ) |
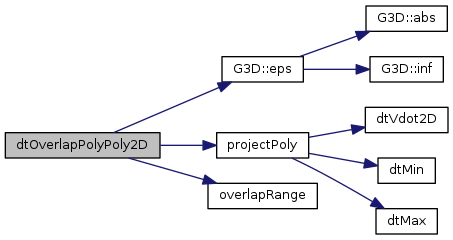
Here is the call graph for this function: Here is the caller graph for this function:| bool dtOverlapPolyPoly2D | ( | const float * | polya, |
| const int | npolya, | ||
| const float * | polyb, | ||
| const int | npolyb | ||
| ) |
All vertices are projected onto the xz-plane, so the y-values are ignored.
Here is the call graph for this function: Here is the caller graph for this function:All points are projected onto the xz-plane, so the y-values are ignored.
Here is the caller graph for this function:| void dtRandomPointInConvexPoly | ( | const float * | pts, |
| const int | npts, | ||
| float * | areas, | ||
| const float | s, | ||
| const float | t, | ||
| float * | out | ||
| ) |
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8