|
TrinityCore
|
|
TrinityCore
|
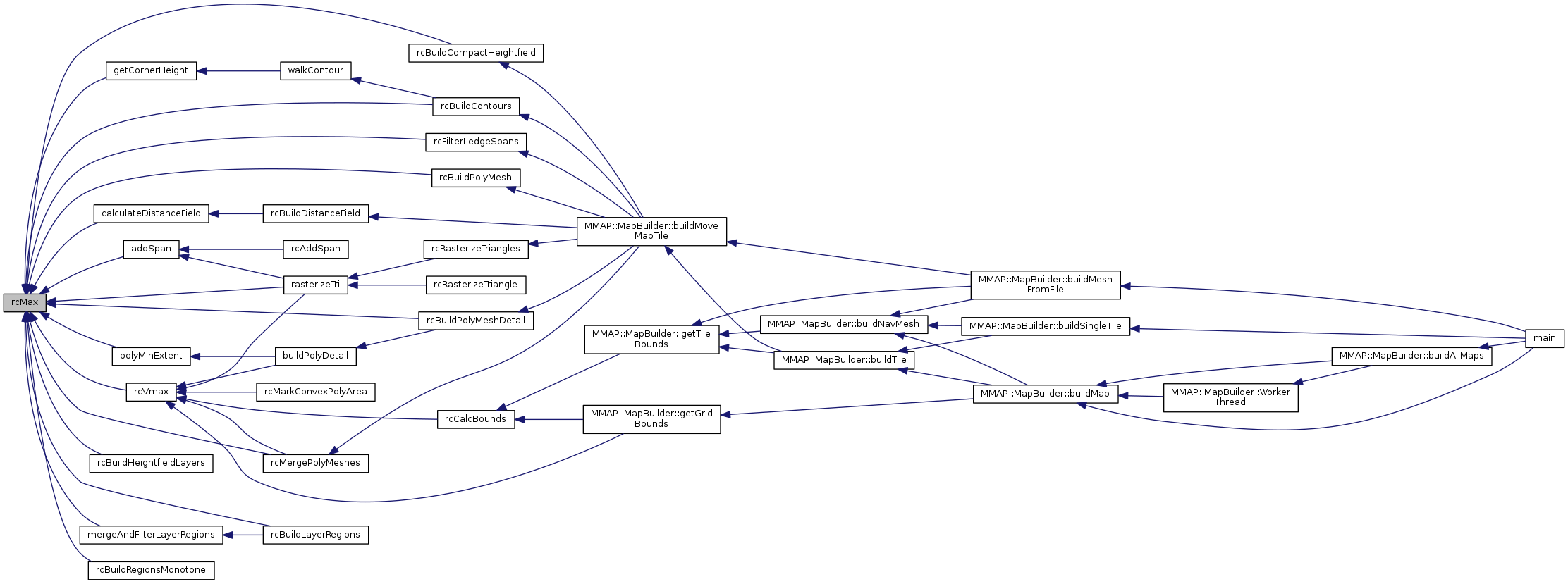
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | rcContext |
| struct | rcConfig |
| struct | rcSpan |
| struct | rcSpanPool |
| struct | rcHeightfield |
| struct | rcCompactCell |
| Provides information on the content of a cell column in a compact heightfield. More... | |
| struct | rcCompactSpan |
| Represents a span of unobstructed space within a compact heightfield. More... | |
| struct | rcCompactHeightfield |
| struct | rcHeightfieldLayer |
| struct | rcHeightfieldLayerSet |
| struct | rcContour |
| Represents a simple, non-overlapping contour in field space. More... | |
| struct | rcContourSet |
| struct | rcPolyMesh |
| struct | rcPolyMeshDetail |
Functions | |
Allocation Functions | |
Functions used to allocate and de-allocate Recast objects.
| |
| rcHeightfield * | rcAllocHeightfield () |
| void | rcFreeHeightField (rcHeightfield *hf) |
| rcCompactHeightfield * | rcAllocCompactHeightfield () |
| void | rcFreeCompactHeightfield (rcCompactHeightfield *chf) |
| rcHeightfieldLayerSet * | rcAllocHeightfieldLayerSet () |
| void | rcFreeHeightfieldLayerSet (rcHeightfieldLayerSet *lset) |
| rcContourSet * | rcAllocContourSet () |
| void | rcFreeContourSet (rcContourSet *cset) |
| rcPolyMesh * | rcAllocPolyMesh () |
| void | rcFreePolyMesh (rcPolyMesh *pmesh) |
| rcPolyMeshDetail * | rcAllocPolyMeshDetail () |
| void | rcFreePolyMeshDetail (rcPolyMeshDetail *dmesh) |
General helper functions | |
| template<class T > | |
| void | rcIgnoreUnused (const T &) |
| template<class T > | |
| void | rcSwap (T &a, T &b) |
| template<class T > | |
| T | rcMin (T a, T b) |
| template<class T > | |
| T | rcMax (T a, T b) |
| template<class T > | |
| T | rcAbs (T a) |
| template<class T > | |
| T | rcSqr (T a) |
| template<class T > | |
| T | rcClamp (T v, T mn, T mx) |
| float | rcSqrt (float x) |
Vector helper functions. | |
| void | rcVcross (float *dest, const float *v1, const float *v2) |
| float | rcVdot (const float *v1, const float *v2) |
| void | rcVmad (float *dest, const float *v1, const float *v2, const float s) |
| void | rcVadd (float *dest, const float *v1, const float *v2) |
| void | rcVsub (float *dest, const float *v1, const float *v2) |
| void | rcVmin (float *mn, const float *v) |
| void | rcVmax (float *mx, const float *v) |
| void | rcVcopy (float *dest, const float *v) |
| float | rcVdist (const float *v1, const float *v2) |
| float | rcVdistSqr (const float *v1, const float *v2) |
| void | rcVnormalize (float *v) |
Heightfield Functions | |
| |
| void | rcCalcBounds (const float *verts, int nv, float *bmin, float *bmax) |
| void | rcCalcGridSize (const float *bmin, const float *bmax, float cs, int *w, int *h) |
| bool | rcCreateHeightfield (rcContext *ctx, rcHeightfield &hf, int width, int height, const float *bmin, const float *bmax, float cs, float ch) |
| void | rcMarkWalkableTriangles (rcContext *ctx, const float walkableSlopeAngle, const float *verts, int nv, const int *tris, int nt, unsigned char *areas) |
| void | rcClearUnwalkableTriangles (rcContext *ctx, const float walkableSlopeAngle, const float *verts, int nv, const int *tris, int nt, unsigned char *areas) |
| void | rcAddSpan (rcContext *ctx, rcHeightfield &hf, const int x, const int y, const unsigned short smin, const unsigned short smax, const unsigned char area, const int flagMergeThr) |
| void | rcRasterizeTriangle (rcContext *ctx, const float *v0, const float *v1, const float *v2, const unsigned char area, rcHeightfield &solid, const int flagMergeThr=1) |
| void | rcRasterizeTriangles (rcContext *ctx, const float *verts, const int nv, const int *tris, const unsigned char *areas, const int nt, rcHeightfield &solid, const int flagMergeThr=1) |
| void | rcRasterizeTriangles (rcContext *ctx, const float *verts, const int nv, const unsigned short *tris, const unsigned char *areas, const int nt, rcHeightfield &solid, const int flagMergeThr=1) |
| void | rcRasterizeTriangles (rcContext *ctx, const float *verts, const unsigned char *areas, const int nt, rcHeightfield &solid, const int flagMergeThr=1) |
| void | rcFilterLowHangingWalkableObstacles (rcContext *ctx, const int walkableClimb, rcHeightfield &solid) |
| void | rcFilterLedgeSpans (rcContext *ctx, const int walkableHeight, const int walkableClimb, rcHeightfield &solid) |
| void | rcFilterWalkableLowHeightSpans (rcContext *ctx, int walkableHeight, rcHeightfield &solid) |
| int | rcGetHeightFieldSpanCount (rcContext *ctx, rcHeightfield &hf) |
Compact Heightfield Functions | |
| |
| bool | rcBuildCompactHeightfield (rcContext *ctx, const int walkableHeight, const int walkableClimb, rcHeightfield &hf, rcCompactHeightfield &chf) |
| bool | rcErodeWalkableArea (rcContext *ctx, int radius, rcCompactHeightfield &chf) |
| bool | rcMedianFilterWalkableArea (rcContext *ctx, rcCompactHeightfield &chf) |
| void | rcMarkBoxArea (rcContext *ctx, const float *bmin, const float *bmax, unsigned char areaId, rcCompactHeightfield &chf) |
| void | rcMarkConvexPolyArea (rcContext *ctx, const float *verts, const int nverts, const float hmin, const float hmax, unsigned char areaId, rcCompactHeightfield &chf) |
| int | rcOffsetPoly (const float *verts, const int nverts, const float offset, float *outVerts, const int maxOutVerts) |
| void | rcMarkCylinderArea (rcContext *ctx, const float *pos, const float r, const float h, unsigned char areaId, rcCompactHeightfield &chf) |
| bool | rcBuildDistanceField (rcContext *ctx, rcCompactHeightfield &chf) |
| bool | rcBuildRegions (rcContext *ctx, rcCompactHeightfield &chf, const int borderSize, const int minRegionArea, const int mergeRegionArea) |
| bool | rcBuildLayerRegions (rcContext *ctx, rcCompactHeightfield &chf, const int borderSize, const int minRegionArea) |
| bool | rcBuildRegionsMonotone (rcContext *ctx, rcCompactHeightfield &chf, const int borderSize, const int minRegionArea, const int mergeRegionArea) |
| void | rcSetCon (rcCompactSpan &s, int dir, int i) |
| int | rcGetCon (const rcCompactSpan &s, int dir) |
| int | rcGetDirOffsetX (int dir) |
| int | rcGetDirOffsetY (int dir) |
Layer, Contour, Polymesh, and Detail Mesh Functions | |
| |
| bool | rcBuildHeightfieldLayers (rcContext *ctx, rcCompactHeightfield &chf, const int borderSize, const int walkableHeight, rcHeightfieldLayerSet &lset) |
| bool | rcBuildContours (rcContext *ctx, rcCompactHeightfield &chf, const float maxError, const int maxEdgeLen, rcContourSet &cset, const int buildFlags=RC_CONTOUR_TESS_WALL_EDGES) |
| bool | rcBuildPolyMesh (rcContext *ctx, rcContourSet &cset, const int nvp, rcPolyMesh &mesh) |
| bool | rcMergePolyMeshes (rcContext *ctx, rcPolyMesh **meshes, const int nmeshes, rcPolyMesh &mesh) |
| bool | rcBuildPolyMeshDetail (rcContext *ctx, const rcPolyMesh &mesh, const rcCompactHeightfield &chf, const float sampleDist, const float sampleMaxError, rcPolyMeshDetail &dmesh) |
| bool | rcCopyPolyMesh (rcContext *ctx, const rcPolyMesh &src, rcPolyMesh &dst) |
| bool | rcMergePolyMeshDetails (rcContext *ctx, rcPolyMeshDetail **meshes, const int nmeshes, rcPolyMeshDetail &mesh) |
Variables | |
| static const float | RC_PI = 3.14159265f |
| The value of PI used by Recast. More... | |
| static const int | RC_SPAN_HEIGHT_BITS = 16 |
| Defines the number of bits allocated to rcSpan::smin and rcSpan::smax. More... | |
| static const int | RC_SPAN_MAX_HEIGHT = (1<<RC_SPAN_HEIGHT_BITS)-1 |
| Defines the maximum value for rcSpan::smin and rcSpan::smax. More... | |
| static const int | RC_SPANS_PER_POOL = 2048 |
| static const unsigned short | RC_BORDER_REG = 0x8000 |
| static const int | RC_BORDER_VERTEX = 0x10000 |
| static const int | RC_AREA_BORDER = 0x20000 |
| static const int | RC_CONTOUR_REG_MASK = 0xffff |
| static const unsigned short | RC_MESH_NULL_IDX = 0xffff |
| static const unsigned char | RC_NULL_AREA = 0 |
| static const unsigned char | RC_WALKABLE_AREA = 63 |
| static const int | RC_NOT_CONNECTED = 0x3f |
| enum rcBuildContoursFlags |
Contour build flags.
| Enumerator | |
|---|---|
| RC_CONTOUR_TESS_WALL_EDGES |
Tessellate solid (impassable) edges during contour simplification. |
| RC_CONTOUR_TESS_AREA_EDGES |
Tessellate edges between areas during contour simplification. |
| enum rcLogCategory |
Recast log categories.
| Enumerator | |
|---|---|
| RC_LOG_PROGRESS |
A progress log entry. |
| RC_LOG_WARNING |
A warning log entry. |
| RC_LOG_ERROR |
An error log entry. |
| enum rcTimerLabel |
Recast performance timer categories.
| Enumerator | |
|---|---|
| RC_TIMER_TOTAL |
The user defined total time of the build. |
| RC_TIMER_TEMP |
A user defined build time. |
| RC_TIMER_RASTERIZE_TRIANGLES |
The time to rasterize the triangles. (See: rcRasterizeTriangle) |
| RC_TIMER_BUILD_COMPACTHEIGHTFIELD |
The time to build the compact heightfield. (See: rcBuildCompactHeightfield) |
| RC_TIMER_BUILD_CONTOURS |
The total time to build the contours. (See: rcBuildContours) |
| RC_TIMER_BUILD_CONTOURS_TRACE |
The time to trace the boundaries of the contours. (See: rcBuildContours) |
| RC_TIMER_BUILD_CONTOURS_SIMPLIFY |
The time to simplify the contours. (See: rcBuildContours) |
| RC_TIMER_FILTER_BORDER |
The time to filter ledge spans. (See: rcFilterLedgeSpans) |
| RC_TIMER_FILTER_WALKABLE |
The time to filter low height spans. (See: rcFilterWalkableLowHeightSpans) |
| RC_TIMER_MEDIAN_AREA |
The time to apply the median filter. (See: rcMedianFilterWalkableArea) |
| RC_TIMER_FILTER_LOW_OBSTACLES |
The time to filter low obstacles. (See: rcFilterLowHangingWalkableObstacles) |
| RC_TIMER_BUILD_POLYMESH |
The time to build the polygon mesh. (See: rcBuildPolyMesh) |
| RC_TIMER_MERGE_POLYMESH |
The time to merge polygon meshes. (See: rcMergePolyMeshes) |
| RC_TIMER_ERODE_AREA |
The time to erode the walkable area. (See: rcErodeWalkableArea) |
| RC_TIMER_MARK_BOX_AREA |
The time to mark a box area. (See: rcMarkBoxArea) |
| RC_TIMER_MARK_CYLINDER_AREA |
The time to mark a cylinder area. (See: rcMarkCylinderArea) |
| RC_TIMER_MARK_CONVEXPOLY_AREA |
The time to mark a convex polygon area. (See: rcMarkConvexPolyArea) |
| RC_TIMER_BUILD_DISTANCEFIELD |
The total time to build the distance field. (See: rcBuildDistanceField) |
| RC_TIMER_BUILD_DISTANCEFIELD_DIST |
The time to build the distances of the distance field. (See: rcBuildDistanceField) |
| RC_TIMER_BUILD_DISTANCEFIELD_BLUR |
The time to blur the distance field. (See: rcBuildDistanceField) |
| RC_TIMER_BUILD_REGIONS |
The total time to build the regions. (See: rcBuildRegions, rcBuildRegionsMonotone) |
| RC_TIMER_BUILD_REGIONS_WATERSHED |
The total time to apply the watershed algorithm. (See: rcBuildRegions) |
| RC_TIMER_BUILD_REGIONS_EXPAND |
The time to expand regions while applying the watershed algorithm. (See: rcBuildRegions) |
| RC_TIMER_BUILD_REGIONS_FLOOD |
The time to flood regions while applying the watershed algorithm. (See: rcBuildRegions) |
| RC_TIMER_BUILD_REGIONS_FILTER |
The time to filter out small regions. (See: rcBuildRegions, rcBuildRegionsMonotone) |
| RC_TIMER_BUILD_LAYERS |
The time to build heightfield layers. (See: rcBuildHeightfieldLayers) |
| RC_TIMER_BUILD_POLYMESHDETAIL |
The time to build the polygon mesh detail. (See: rcBuildPolyMeshDetail) |
| RC_TIMER_MERGE_POLYMESHDETAIL |
The time to merge polygon mesh details. (See: rcMergePolyMeshDetails) |
| RC_MAX_TIMERS |
The maximum number of timers. (Used for iterating timers.) |
|
inline |
| void rcAddSpan | ( | rcContext * | , |
| rcHeightfield & | hf, | ||
| const int | x, | ||
| const int | y, | ||
| const unsigned short | smin, | ||
| const unsigned short | smax, | ||
| const unsigned char | area, | ||
| const int | flagMergeThr | ||
| ) |
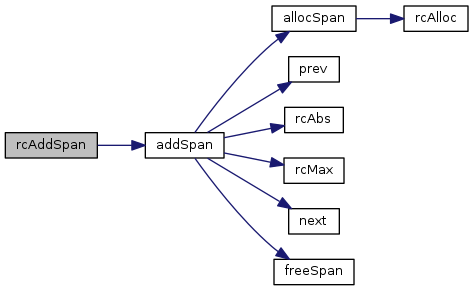
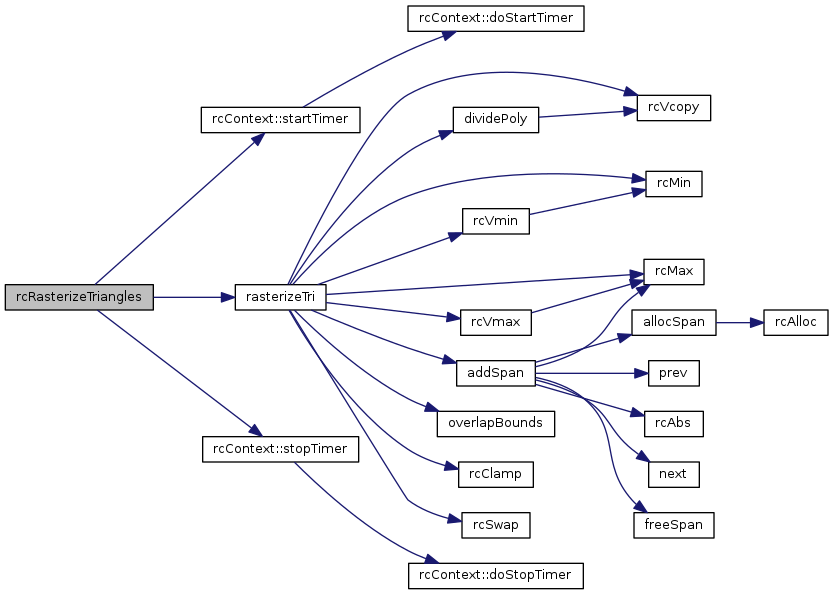
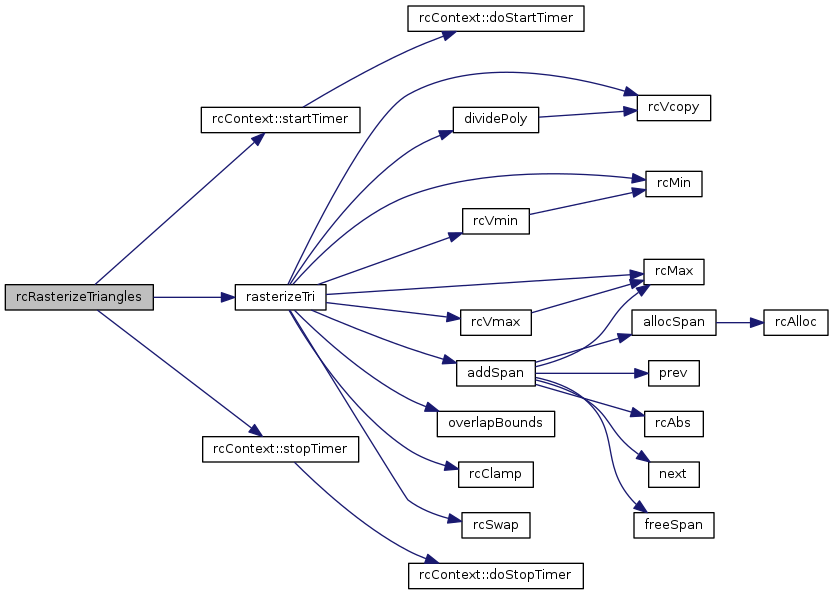
Adds a span to the specified heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in,out] | hf | An initialized heightfield. |
| [in] | x | The width index where the span is to be added. [Limits: 0 <= value < rcHeightfield::width] |
| [in] | y | The height index where the span is to be added. [Limits: 0 <= value < rcHeightfield::height] |
| [in] | smin | The minimum height of the span. [Limit: < smax] [Units: vx] |
| [in] | smax | The maximum height of the span. [Limit: <= RC_SPAN_MAX_HEIGHT] [Units: vx] |
| [in] | area | The area id of the span. [Limit: <= RC_WALKABLE_AREA) |
| [in] | flagMergeThr | The merge theshold. [Limit: >= 0] [Units: vx] |
The span addition can be set to favor flags. If the span is merged to another span and the new smax is within flagMergeThr units from the existing span, the span flags are merged.
Here is the call graph for this function:| rcCompactHeightfield* rcAllocCompactHeightfield | ( | ) |
Allocates a compact heightfield object using the Recast allocator.
Here is the call graph for this function: Here is the caller graph for this function:| rcContourSet* rcAllocContourSet | ( | ) |
Allocates a contour set object using the Recast allocator.
Here is the call graph for this function: Here is the caller graph for this function:| rcHeightfield* rcAllocHeightfield | ( | ) |
Allocates a heightfield object using the Recast allocator.
Here is the call graph for this function: Here is the caller graph for this function:| rcHeightfieldLayerSet* rcAllocHeightfieldLayerSet | ( | ) |
Allocates a heightfield layer set using the Recast allocator.
Here is the call graph for this function:| rcPolyMesh* rcAllocPolyMesh | ( | ) |
Allocates a polygon mesh object using the Recast allocator.
Here is the call graph for this function: Here is the caller graph for this function:| rcPolyMeshDetail* rcAllocPolyMeshDetail | ( | ) |
Allocates a detail mesh object using the Recast allocator.
Here is the call graph for this function: Here is the caller graph for this function:| bool rcBuildCompactHeightfield | ( | rcContext * | ctx, |
| const int | walkableHeight, | ||
| const int | walkableClimb, | ||
| rcHeightfield & | hf, | ||
| rcCompactHeightfield & | chf | ||
| ) |
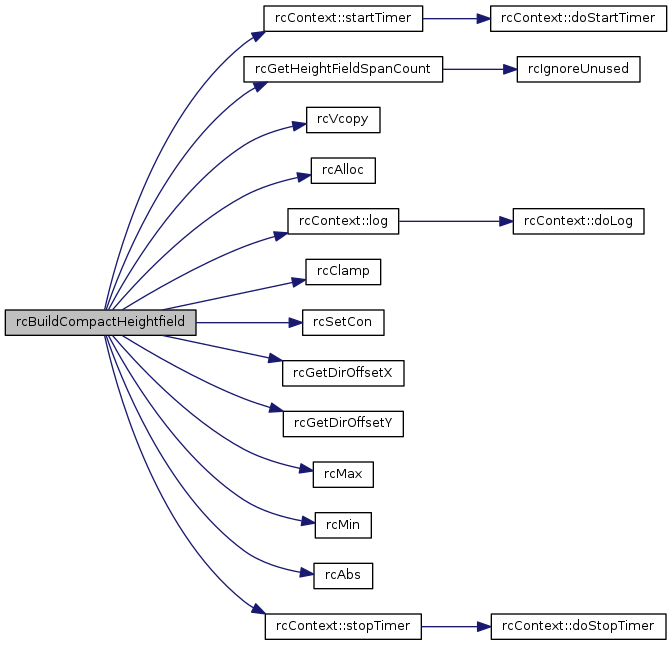
Builds a compact heightfield representing open space, from a heightfield representing solid space.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | walkableHeight | Minimum floor to 'ceiling' height that will still allow the floor area to be considered walkable. [Limit: >= 3] [Units: vx] |
| [in] | walkableClimb | Maximum ledge height that is considered to still be traversable. [Limit: >=0] [Units: vx] |
| [in] | hf | The heightfield to be compacted. |
| [out] | chf | The resulting compact heightfield. (Must be pre-allocated.) |
This is just the beginning of the process of fully building a compact heightfield. Various filters may be applied, then the distance field and regions built. E.g: rcBuildDistanceField and rcBuildRegions
See the rcConfig documentation for more information on the configuration parameters.
Here is the call graph for this function: Here is the caller graph for this function:| bool rcBuildContours | ( | rcContext * | ctx, |
| rcCompactHeightfield & | chf, | ||
| const float | maxError, | ||
| const int | maxEdgeLen, | ||
| rcContourSet & | cset, | ||
| const int | buildFlags | ||
| ) |
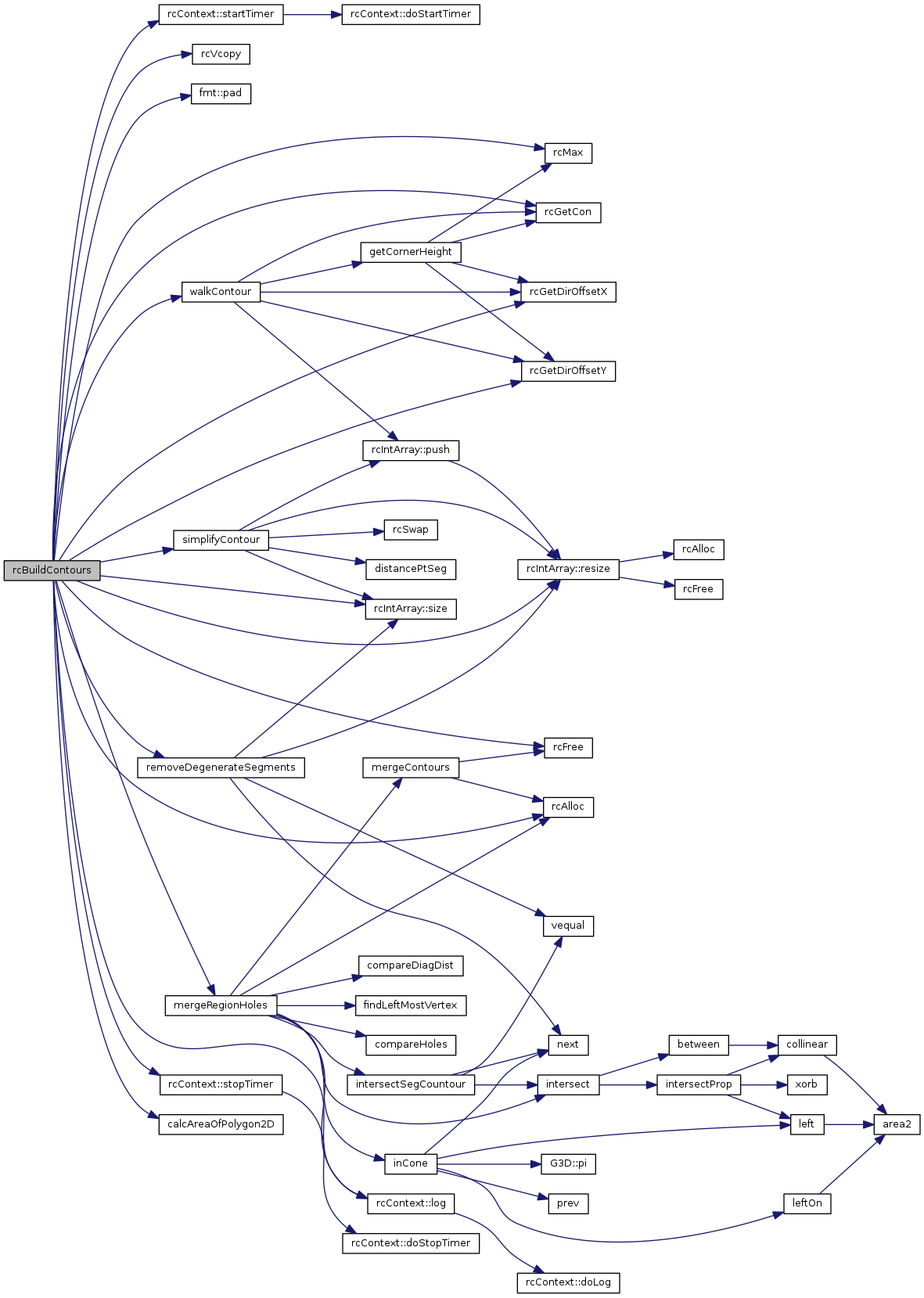
Builds a contour set from the region outlines in the provided compact heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | chf | A fully built compact heightfield. |
| [in] | maxError | The maximum distance a simplfied contour's border edges should deviate the original raw contour. [Limit: >=0] [Units: wu] |
| [in] | maxEdgeLen | The maximum allowed length for contour edges along the border of the mesh. [Limit: >=0] [Units: vx] |
| [out] | cset | The resulting contour set. (Must be pre-allocated.) |
| [in] | buildFlags | The build flags. (See: rcBuildContoursFlags) |
The raw contours will match the region outlines exactly. The maxError and maxEdgeLen parameters control how closely the simplified contours will match the raw contours.
Simplified contours are generated such that the vertices for portals between areas match up. (They are considered mandatory vertices.)
Setting maxEdgeLength to zero will disabled the edge length feature.
See the rcConfig documentation for more information on the configuration parameters.
Here is the call graph for this function: Here is the caller graph for this function:| bool rcBuildDistanceField | ( | rcContext * | ctx, |
| rcCompactHeightfield & | chf | ||
| ) |
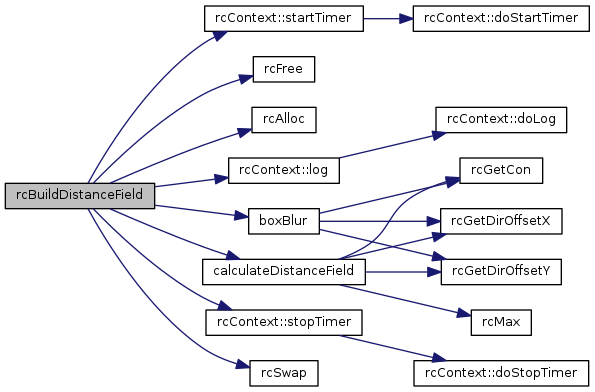
Builds the distance field for the specified compact heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in,out] | chf | A populated compact heightfield. |
This is usually the second to the last step in creating a fully built compact heightfield. This step is required before regions are built using rcBuildRegions or rcBuildRegionsMonotone.
After this step, the distance data is available via the rcCompactHeightfield::maxDistance and rcCompactHeightfield::dist fields.
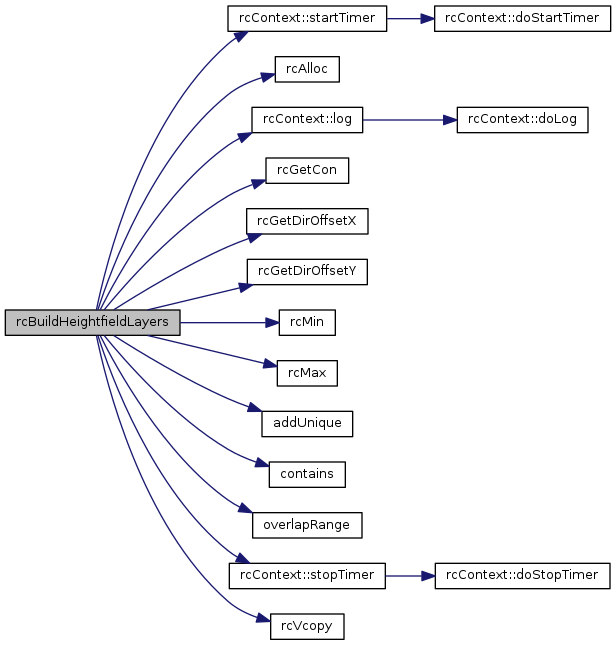
Here is the call graph for this function: Here is the caller graph for this function:| bool rcBuildHeightfieldLayers | ( | rcContext * | ctx, |
| rcCompactHeightfield & | chf, | ||
| const int | borderSize, | ||
| const int | walkableHeight, | ||
| rcHeightfieldLayerSet & | lset | ||
| ) |
Builds a layer set from the specified compact heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | chf | A fully built compact heightfield. |
| [in] | borderSize | The size of the non-navigable border around the heightfield. [Limit: >=0] [Units: vx] |
| [in] | walkableHeight | Minimum floor to 'ceiling' height that will still allow the floor area to be considered walkable. [Limit: >= 3] [Units: vx] |
| [out] | lset | The resulting layer set. (Must be pre-allocated.) |
See the rcConfig documentation for more information on the configuration parameters.
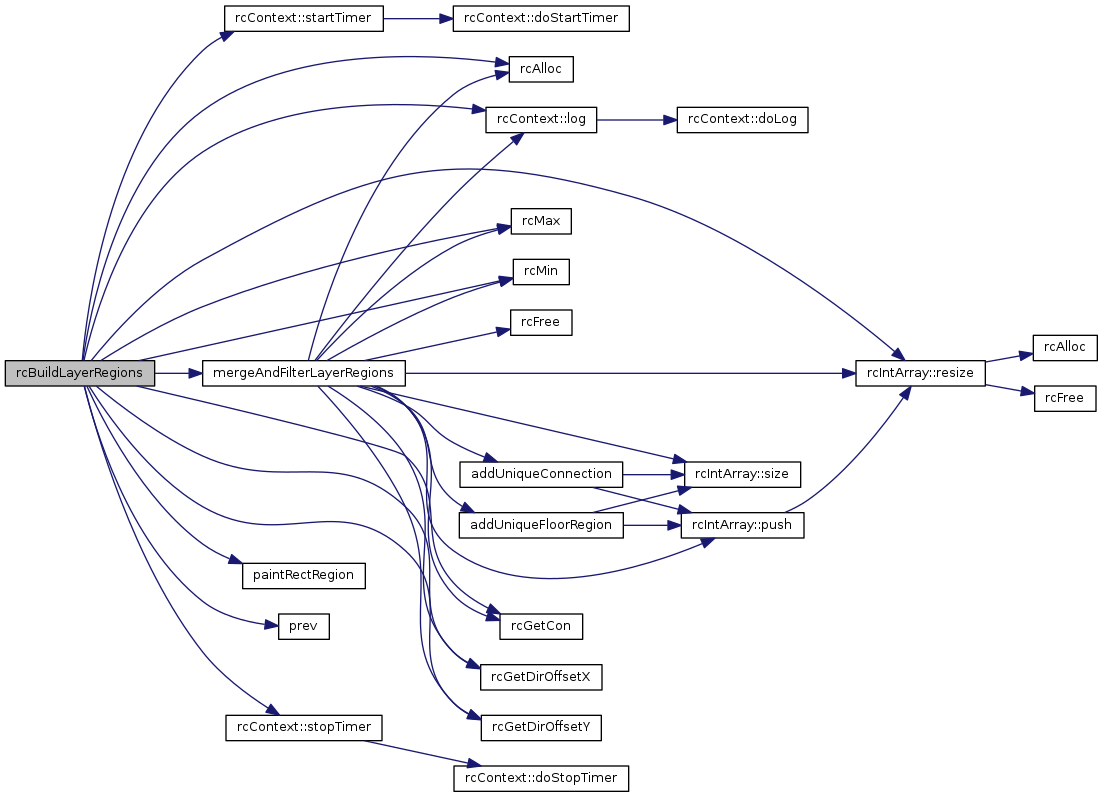
Here is the call graph for this function:| bool rcBuildLayerRegions | ( | rcContext * | ctx, |
| rcCompactHeightfield & | chf, | ||
| const int | borderSize, | ||
| const int | minRegionArea | ||
| ) |
Builds region data for the heightfield by partitioning the heightfield in non-overlapping layers.
| [in,out] | ctx | The build context to use during the operation. |
| [in,out] | chf | A populated compact heightfield. |
| [in] | borderSize | The size of the non-navigable border around the heightfield. [Limit: >=0] [Units: vx] |
| [in] | minRegionArea | The minimum number of cells allowed to form isolated island areas. [Limit: >=0] [Units: vx]. |
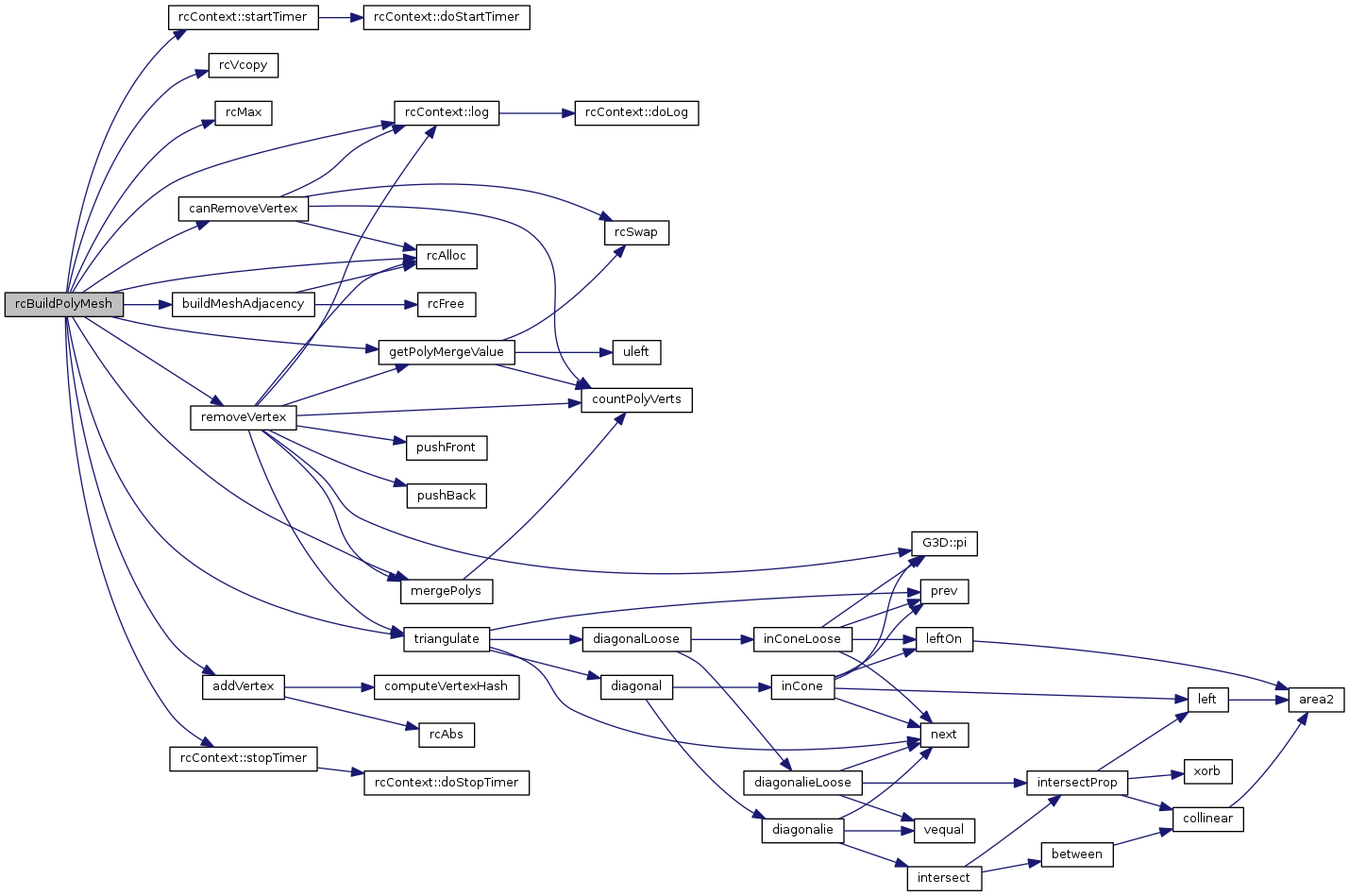
Here is the call graph for this function:| bool rcBuildPolyMesh | ( | rcContext * | ctx, |
| rcContourSet & | cset, | ||
| const int | nvp, | ||
| rcPolyMesh & | mesh | ||
| ) |
Builds a polygon mesh from the provided contours.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | cset | A fully built contour set. |
| [in] | nvp | The maximum number of vertices allowed for polygons generated during the contour to polygon conversion process. [Limit: >= 3] |
| [out] | mesh | The resulting polygon mesh. (Must be re-allocated.) |
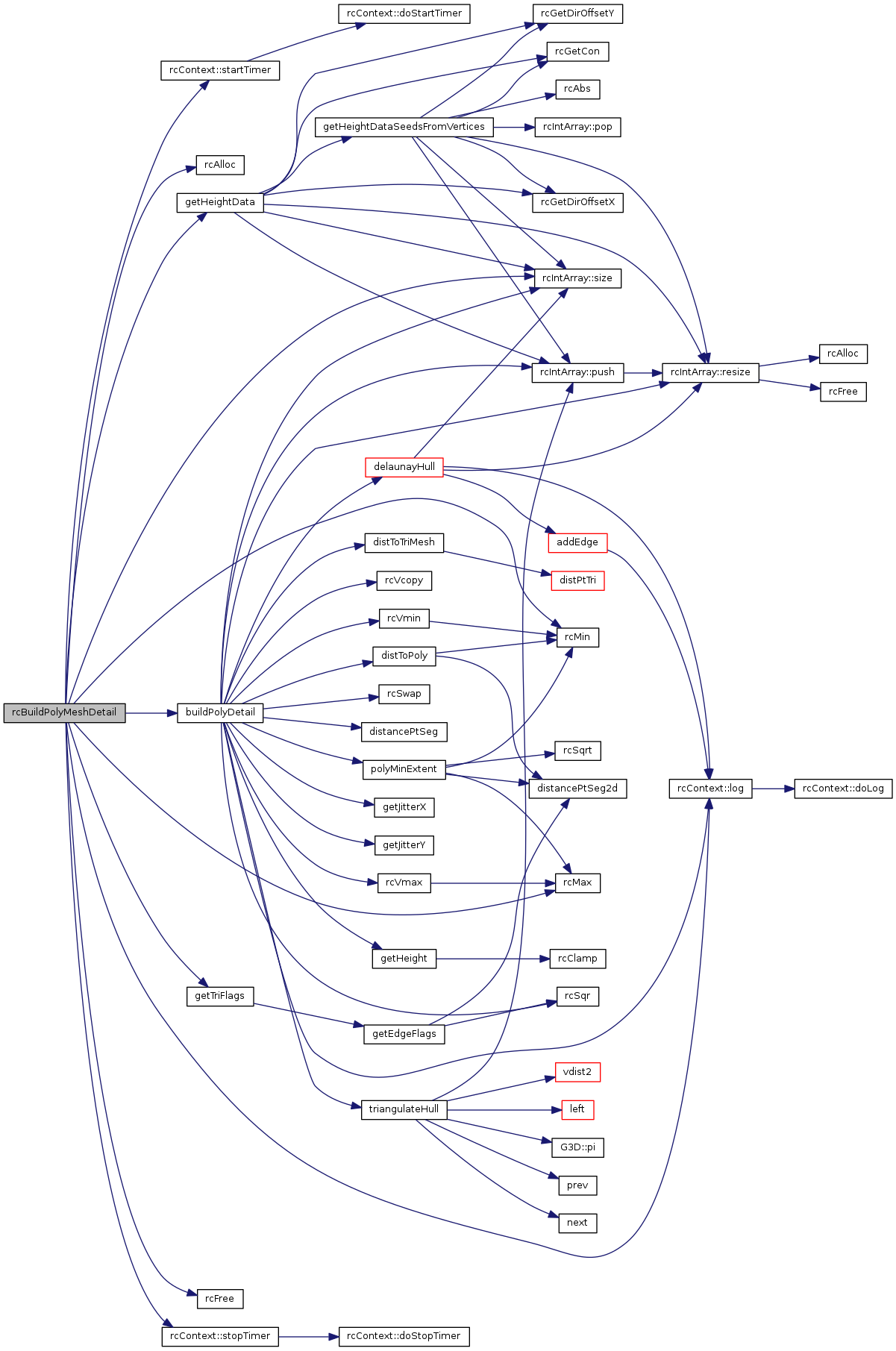
Here is the call graph for this function: Here is the caller graph for this function:| bool rcBuildPolyMeshDetail | ( | rcContext * | ctx, |
| const rcPolyMesh & | mesh, | ||
| const rcCompactHeightfield & | chf, | ||
| const float | sampleDist, | ||
| const float | sampleMaxError, | ||
| rcPolyMeshDetail & | dmesh | ||
| ) |
Builds a detail mesh from the provided polygon mesh.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | mesh | A fully built polygon mesh. |
| [in] | chf | The compact heightfield used to build the polygon mesh. |
| [in] | sampleDist | Sets the distance to use when samping the heightfield. [Limit: >=0] [Units: wu] |
| [in] | sampleMaxError | The maximum distance the detail mesh surface should deviate from heightfield data. [Limit: >=0] [Units: wu] |
| [out] | dmesh | The resulting detail mesh. (Must be pre-allocated.) |
See the rcConfig documentation for more information on the configuration parameters.
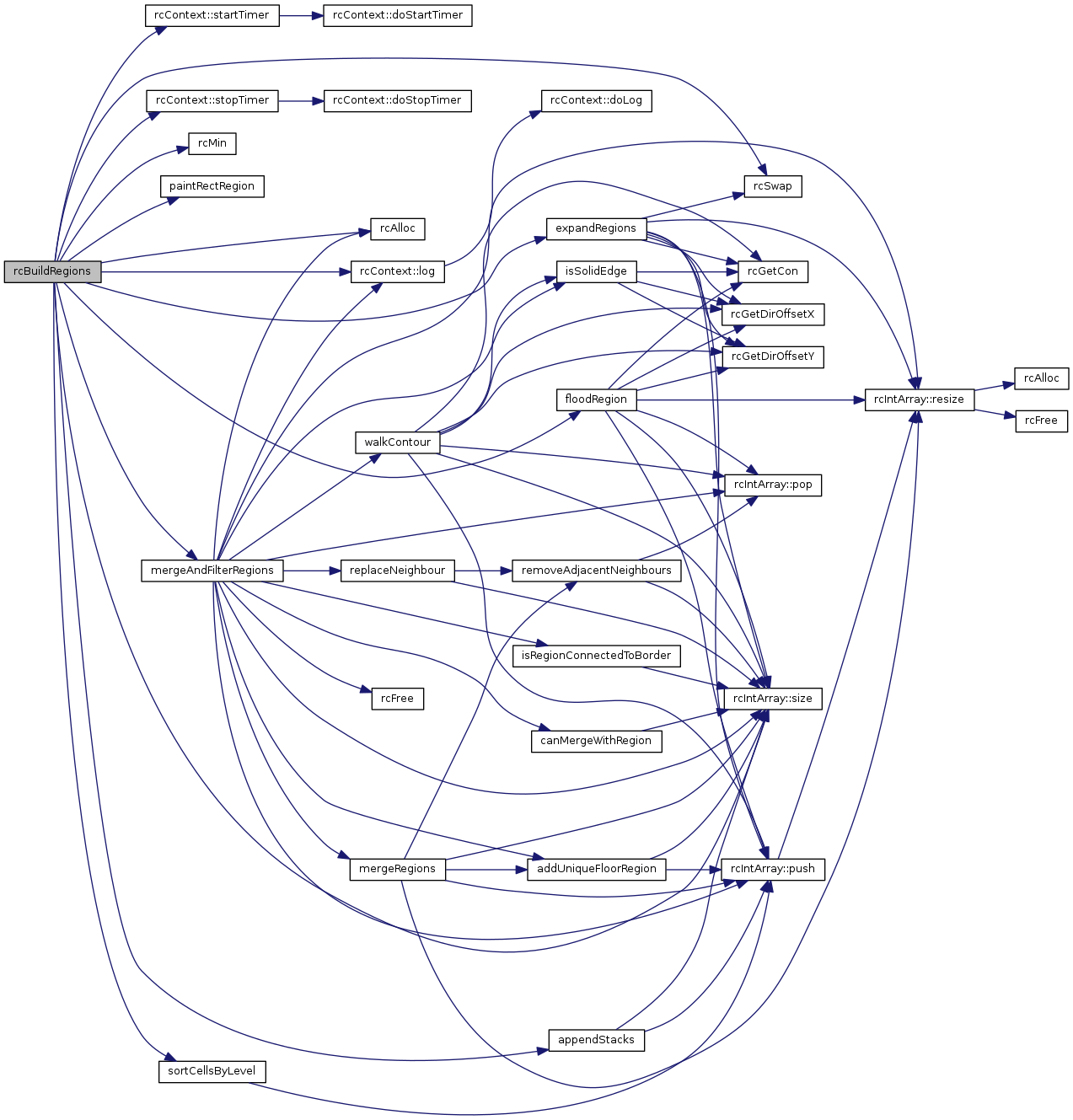
Here is the call graph for this function: Here is the caller graph for this function:| bool rcBuildRegions | ( | rcContext * | ctx, |
| rcCompactHeightfield & | chf, | ||
| const int | borderSize, | ||
| const int | minRegionArea, | ||
| const int | mergeRegionArea | ||
| ) |
Builds region data for the heightfield using watershed partitioning.
| [in,out] | ctx | The build context to use during the operation. |
| [in,out] | chf | A populated compact heightfield. |
| [in] | borderSize | The size of the non-navigable border around the heightfield. [Limit: >=0] [Units: vx] |
| [in] | minRegionArea | The minimum number of cells allowed to form isolated island areas. [Limit: >=0] [Units: vx]. |
| [in] | mergeRegionArea | Any regions with a span count smaller than this value will, if possible, be merged with larger regions. [Limit: >=0] [Units: vx] |
Non-null regions will consist of connected, non-overlapping walkable spans that form a single contour. Contours will form simple polygons.
If multiple regions form an area that is smaller than minRegionArea, then all spans will be re-assigned to the zero (null) region.
Watershed partitioning can result in smaller than necessary regions, especially in diagonal corridors. mergeRegionArea helps reduce unecessarily small regions.
See the rcConfig documentation for more information on the configuration parameters.
The region data will be available via the rcCompactHeightfield::maxRegions and rcCompactSpan::reg fields.
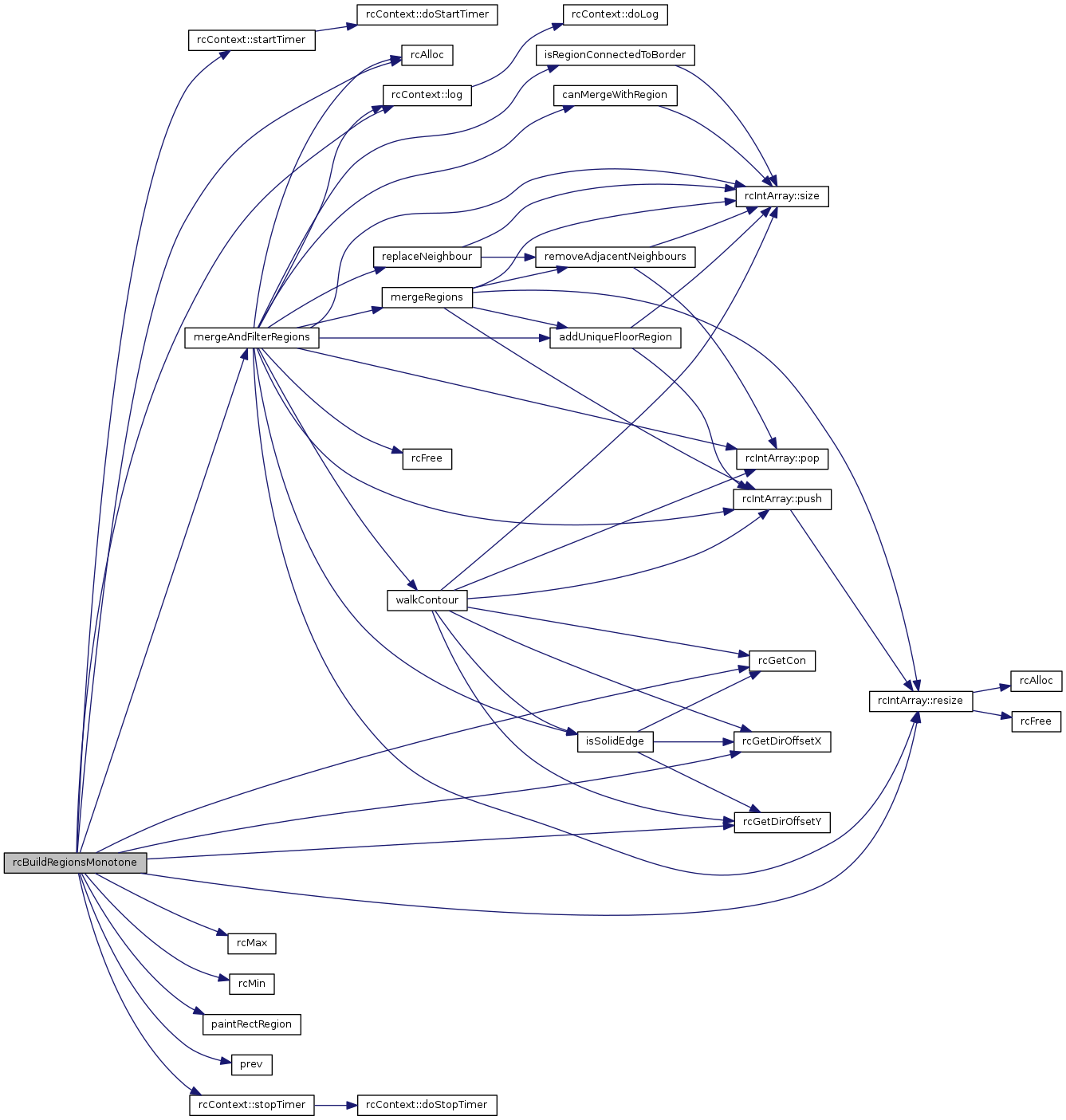
Here is the call graph for this function: Here is the caller graph for this function:| bool rcBuildRegionsMonotone | ( | rcContext * | ctx, |
| rcCompactHeightfield & | chf, | ||
| const int | borderSize, | ||
| const int | minRegionArea, | ||
| const int | mergeRegionArea | ||
| ) |
Builds region data for the heightfield using simple monotone partitioning.
| [in,out] | ctx | The build context to use during the operation. |
| [in,out] | chf | A populated compact heightfield. |
| [in] | borderSize | The size of the non-navigable border around the heightfield. [Limit: >=0] [Units: vx] |
| [in] | minRegionArea | The minimum number of cells allowed to form isolated island areas. [Limit: >=0] [Units: vx]. |
| [in] | mergeRegionArea | Any regions with a span count smaller than this value will, if possible, be merged with larger regions. [Limit: >=0] [Units: vx] |
Non-null regions will consist of connected, non-overlapping walkable spans that form a single contour. Contours will form simple polygons.
If multiple regions form an area that is smaller than minRegionArea, then all spans will be re-assigned to the zero (null) region.
Partitioning can result in smaller than necessary regions. mergeRegionArea helps reduce unecessarily small regions.
See the rcConfig documentation for more information on the configuration parameters.
The region data will be available via the rcCompactHeightfield::maxRegions and rcCompactSpan::reg fields.
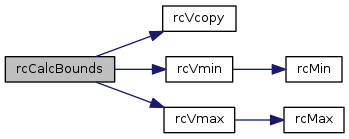
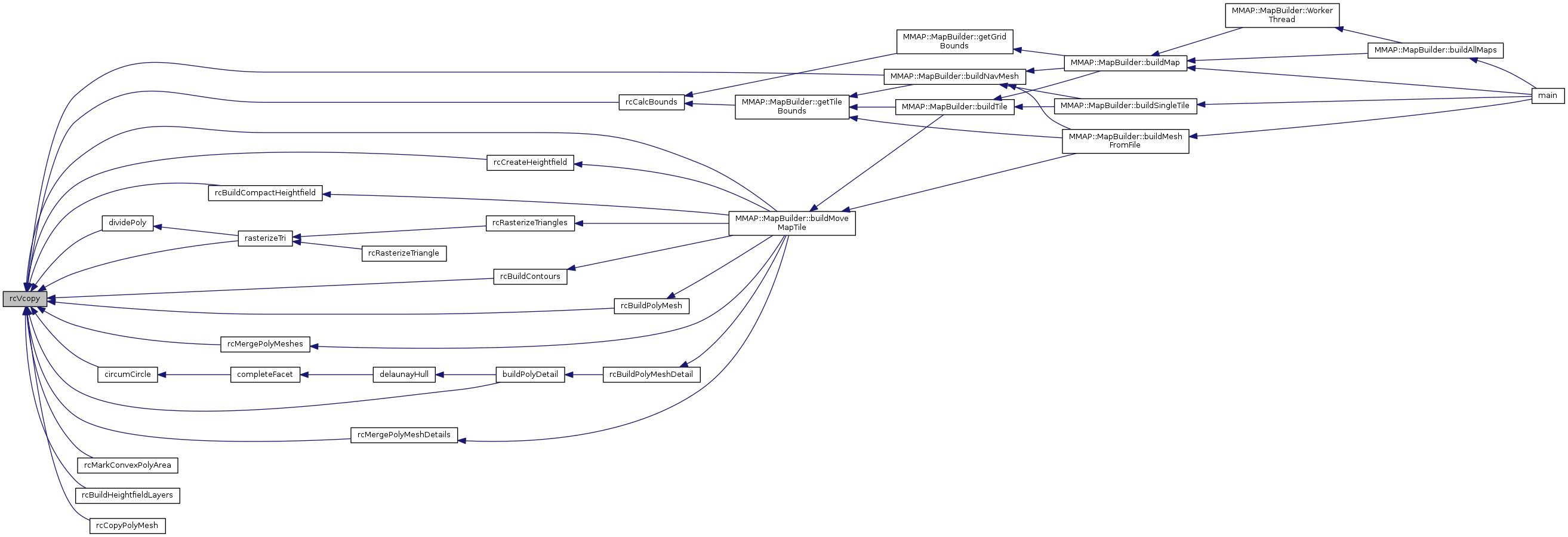
Here is the call graph for this function:| void rcCalcBounds | ( | const float * | verts, |
| int | nv, | ||
| float * | bmin, | ||
| float * | bmax | ||
| ) |
Calculates the bounding box of an array of vertices.
| [in] | verts | An array of vertices. [(x, y, z) * nv] |
| [in] | nv | The number of vertices in the verts array. |
| [out] | bmin | The minimum bounds of the AABB. [(x, y, z)] [Units: wu] |
| [out] | bmax | The maximum bounds of the AABB. [(x, y, z)] [Units: wu] |
Here is the call graph for this function: Here is the caller graph for this function:Calculates the grid size based on the bounding box and grid cell size.
| [in] | bmin | The minimum bounds of the AABB. [(x, y, z)] [Units: wu] |
| [in] | bmax | The maximum bounds of the AABB. [(x, y, z)] [Units: wu] |
| [in] | cs | The xz-plane cell size. [Limit: > 0] [Units: wu] |
| [out] | w | The width along the x-axis. [Limit: >= 0] [Units: vx] |
| [out] | h | The height along the z-axis. [Limit: >= 0] [Units: vx] |
Here is the caller graph for this function:
|
inline |
Clamps the value to the specified range.
| [in] | v | The value to clamp. |
| [in] | mn | The minimum permitted return value. |
| [in] | mx | The maximum permitted return value. |
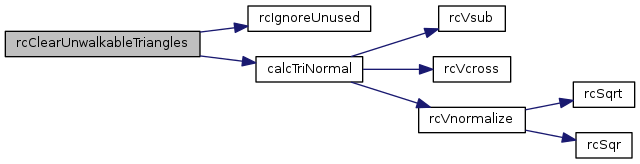
Here is the caller graph for this function:| void rcClearUnwalkableTriangles | ( | rcContext * | ctx, |
| const float | walkableSlopeAngle, | ||
| const float * | verts, | ||
| int | , | ||
| const int * | tris, | ||
| int | nt, | ||
| unsigned char * | areas | ||
| ) |
Sets the area id of all triangles with a slope greater than or equal to the specified value to RC_NULL_AREA.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | walkableSlopeAngle | The maximum slope that is considered walkable. [Limits: 0 <= value < 90] [Units: Degrees] |
| [in] | verts | The vertices. [(x, y, z) * nv] |
| [in] | nv | The number of vertices. |
| [in] | tris | The triangle vertex indices. [(vertA, vertB, vertC) * nt] |
| [in] | nt | The number of triangles. |
| [out] | areas | The triangle area ids. [Length: >= nt] |
Only sets the area id's for the unwalkable triangles. Does not alter the area id's for walkable triangles.
See the rcConfig documentation for more information on the configuration parameters.
Here is the call graph for this function: Here is the caller graph for this function:| bool rcCopyPolyMesh | ( | rcContext * | ctx, |
| const rcPolyMesh & | src, | ||
| rcPolyMesh & | dst | ||
| ) |
Copies the poly mesh data from src to dst.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | src | The source mesh to copy from. |
| [out] | dst | The resulting detail mesh. (Must be pre-allocated, must be empty mesh.) |
Here is the call graph for this function:| bool rcCreateHeightfield | ( | rcContext * | ctx, |
| rcHeightfield & | hf, | ||
| int | width, | ||
| int | height, | ||
| const float * | bmin, | ||
| const float * | bmax, | ||
| float | cs, | ||
| float | ch | ||
| ) |
Initializes a new heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in,out] | hf | The allocated heightfield to initialize. |
| [in] | width | The width of the field along the x-axis. [Limit: >= 0] [Units: vx] |
| [in] | height | The height of the field along the z-axis. [Limit: >= 0] [Units: vx] |
| [in] | bmin | The minimum bounds of the field's AABB. [(x, y, z)] [Units: wu] |
| [in] | bmax | The maximum bounds of the field's AABB. [(x, y, z)] [Units: wu] |
| [in] | cs | The xz-plane cell size to use for the field. [Limit: > 0] [Units: wu] |
| [in] | ch | The y-axis cell size to use for field. [Limit: > 0] [Units: wu] |
See the rcConfig documentation for more information on the configuration parameters.
Here is the call graph for this function: Here is the caller graph for this function:| bool rcErodeWalkableArea | ( | rcContext * | ctx, |
| int | radius, | ||
| rcCompactHeightfield & | chf | ||
| ) |
Erodes the walkable area within the heightfield by the specified radius.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | radius | The radius of erosion. [Limits: 0 < value < 255] [Units: vx] |
| [in,out] | chf | The populated compact heightfield to erode. |
Basically, any spans that are closer to a boundary or obstruction than the specified radius are marked as unwalkable.
This method is usually called immediately after the heightfield has been built.
Here is the call graph for this function: Here is the caller graph for this function:| void rcFilterLedgeSpans | ( | rcContext * | ctx, |
| const int | walkableHeight, | ||
| const int | walkableClimb, | ||
| rcHeightfield & | solid | ||
| ) |
Marks spans that are ledges as not-walkable.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | walkableHeight | Minimum floor to 'ceiling' height that will still allow the floor area to be considered walkable. [Limit: >= 3] [Units: vx] |
| [in] | walkableClimb | Maximum ledge height that is considered to still be traversable. [Limit: >=0] [Units: vx] |
| [in,out] | solid | A fully built heightfield. (All spans have been added.) |
A ledge is a span with one or more neighbors whose maximum is further away than walkableClimb from the current span's maximum. This method removes the impact of the overestimation of conservative voxelization so the resulting mesh will not have regions hanging in the air over ledges.
A span is a ledge if: rcAbs(currentSpan.smax - neighborSpan.smax) > walkableClimb
Here is the call graph for this function: Here is the caller graph for this function:| void rcFilterLowHangingWalkableObstacles | ( | rcContext * | ctx, |
| const int | walkableClimb, | ||
| rcHeightfield & | solid | ||
| ) |
Marks non-walkable spans as walkable if their maximum is within walkableClimp of a walkable neihbor.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | walkableClimb | Maximum ledge height that is considered to still be traversable. [Limit: >=0] [Units: vx] |
| [in,out] | solid | A fully built heightfield. (All spans have been added.) |
Allows the formation of walkable regions that will flow over low lying objects such as curbs, and up structures such as stairways.
Two neighboring spans are walkable if: rcAbs(currentSpan.smax - neighborSpan.smax) < waklableClimb
Here is the call graph for this function: Here is the caller graph for this function:| void rcFilterWalkableLowHeightSpans | ( | rcContext * | ctx, |
| int | walkableHeight, | ||
| rcHeightfield & | solid | ||
| ) |
Marks walkable spans as not walkable if the clearence above the span is less than the specified height.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | walkableHeight | Minimum floor to 'ceiling' height that will still allow the floor area to be considered walkable. [Limit: >= 3] [Units: vx] |
| [in,out] | solid | A fully built heightfield. (All spans have been added.) |
For this filter, the clearance above the span is the distance from the span's maximum to the next higher span's minimum. (Same grid column.)
Here is the call graph for this function: Here is the caller graph for this function:| void rcFreeCompactHeightfield | ( | rcCompactHeightfield * | chf | ) |
Frees the specified compact heightfield object using the Recast allocator.
| [in] | chf | A compact heightfield allocated using rcAllocCompactHeightfield |
Here is the call graph for this function: Here is the caller graph for this function:| void rcFreeContourSet | ( | rcContourSet * | cset | ) |
Frees the specified contour set using the Recast allocator.
| [in] | cset | A contour set allocated using rcAllocContourSet |
Here is the call graph for this function: Here is the caller graph for this function:| void rcFreeHeightField | ( | rcHeightfield * | hf | ) |
Frees the specified heightfield object using the Recast allocator.
| [in] | hf | A heightfield allocated using rcAllocHeightfield |
Here is the call graph for this function: Here is the caller graph for this function:| void rcFreeHeightfieldLayerSet | ( | rcHeightfieldLayerSet * | lset | ) |
Frees the specified heightfield layer set using the Recast allocator.
| [in] | lset | A heightfield layer set allocated using rcAllocHeightfieldLayerSet |
Here is the call graph for this function:| void rcFreePolyMesh | ( | rcPolyMesh * | pmesh | ) |
Frees the specified polygon mesh using the Recast allocator.
| [in] | pmesh | A polygon mesh allocated using rcAllocPolyMesh |
Here is the call graph for this function: Here is the caller graph for this function:| void rcFreePolyMeshDetail | ( | rcPolyMeshDetail * | dmesh | ) |
Frees the specified detail mesh using the Recast allocator.
| [in] | dmesh | A detail mesh allocated using rcAllocPolyMeshDetail |
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
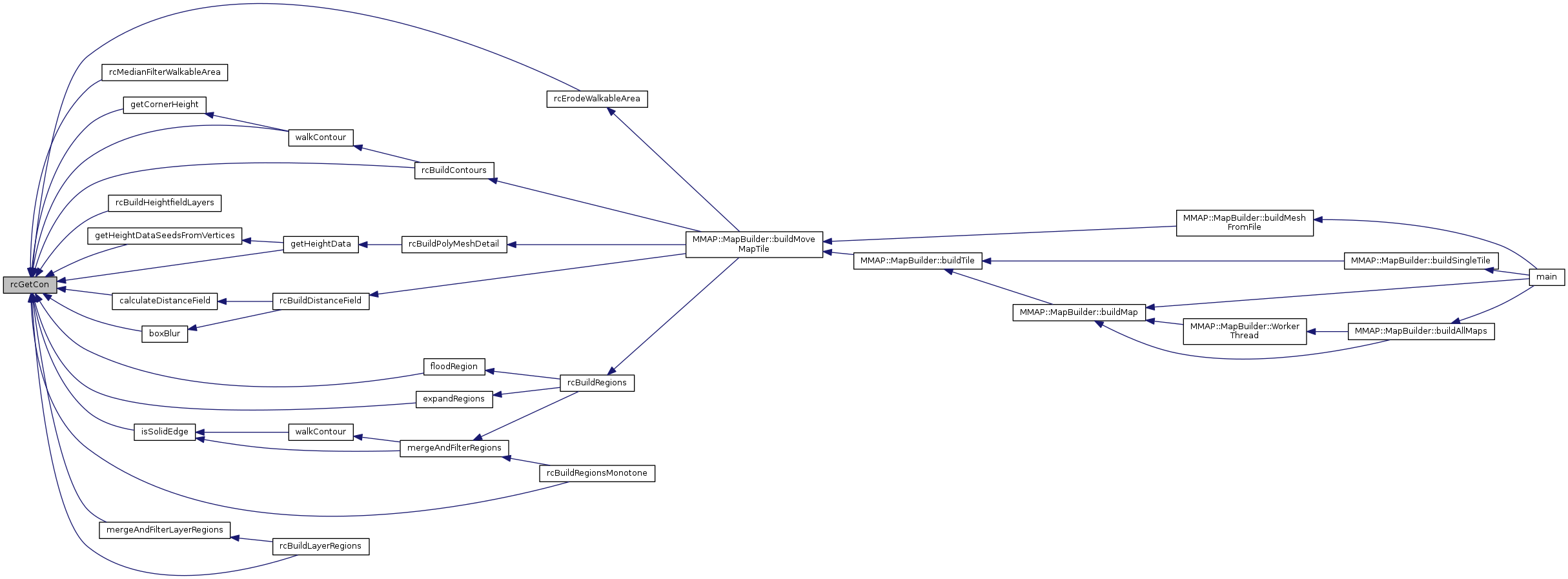
Gets neighbor connection data for the specified direction.
| [in] | s | The span to check. |
| [in] | dir | The direction to check. [Limits: 0 <= value < 4] |
Here is the caller graph for this function:
|
inline |
Gets the standard width (x-axis) offset for the specified direction.
| [in] | dir | The direction. [Limits: 0 <= value < 4] |
Here is the caller graph for this function:
|
inline |
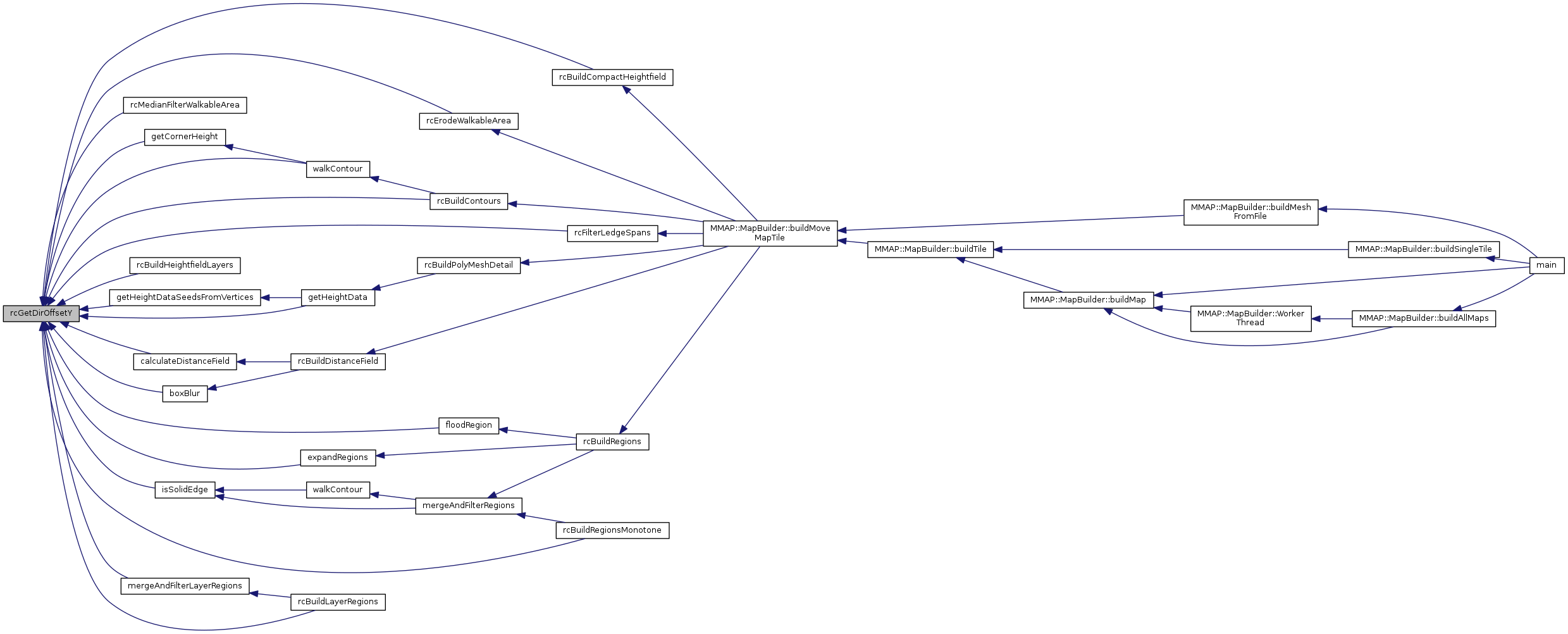
Gets the standard height (z-axis) offset for the specified direction.
| [in] | dir | The direction. [Limits: 0 <= value < 4] |
Here is the caller graph for this function:| int rcGetHeightFieldSpanCount | ( | rcContext * | ctx, |
| rcHeightfield & | hf | ||
| ) |
Returns the number of spans contained in the specified heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | hf | An initialized heightfield. |
Here is the call graph for this function: Here is the caller graph for this function:| void rcIgnoreUnused | ( | const T & | ) |
| void rcMarkBoxArea | ( | rcContext * | ctx, |
| const float * | bmin, | ||
| const float * | bmax, | ||
| unsigned char | areaId, | ||
| rcCompactHeightfield & | chf | ||
| ) |
Applies an area id to all spans within the specified bounding box. (AABB)
| [in,out] | ctx | The build context to use during the operation. |
| [in] | bmin | The minimum of the bounding box. [(x, y, z)] |
| [in] | bmax | The maximum of the bounding box. [(x, y, z)] |
| [in] | areaId | The area id to apply. [Limit: <= RC_WALKABLE_AREA] |
| [in,out] | chf | A populated compact heightfield. |
The value of spacial parameters are in world units.
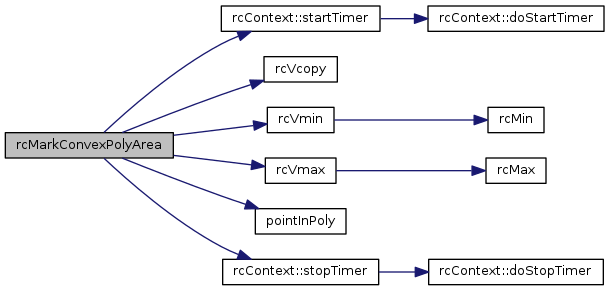
Here is the call graph for this function:| void rcMarkConvexPolyArea | ( | rcContext * | ctx, |
| const float * | verts, | ||
| const int | nverts, | ||
| const float | hmin, | ||
| const float | hmax, | ||
| unsigned char | areaId, | ||
| rcCompactHeightfield & | chf | ||
| ) |
Applies the area id to the all spans within the specified convex polygon.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | verts | The vertices of the polygon [Fomr: (x, y, z) * nverts] |
| [in] | nverts | The number of vertices in the polygon. |
| [in] | hmin | The height of the base of the polygon. |
| [in] | hmax | The height of the top of the polygon. |
| [in] | areaId | The area id to apply. [Limit: <= RC_WALKABLE_AREA] |
| [in,out] | chf | A populated compact heightfield. |
The value of spacial parameters are in world units.
The y-values of the polygon vertices are ignored. So the polygon is effectively projected onto the xz-plane at hmin, then extruded to hmax.
Here is the call graph for this function:| void rcMarkCylinderArea | ( | rcContext * | ctx, |
| const float * | pos, | ||
| const float | r, | ||
| const float | h, | ||
| unsigned char | areaId, | ||
| rcCompactHeightfield & | chf | ||
| ) |
Applies the area id to all spans within the specified cylinder.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | pos | The center of the base of the cylinder. [Form: (x, y, z)] |
| [in] | r | The radius of the cylinder. |
| [in] | h | The height of the cylinder. |
| [in] | areaId | The area id to apply. [Limit: <= RC_WALKABLE_AREA] |
| [in,out] | chf | A populated compact heightfield. |
The value of spacial parameters are in world units.
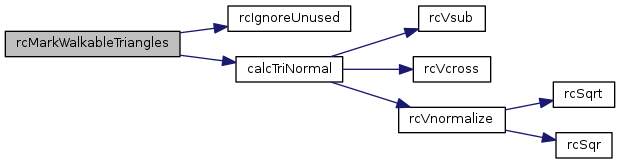
Here is the call graph for this function:| void rcMarkWalkableTriangles | ( | rcContext * | ctx, |
| const float | walkableSlopeAngle, | ||
| const float * | verts, | ||
| int | , | ||
| const int * | tris, | ||
| int | nt, | ||
| unsigned char * | areas | ||
| ) |
Sets the area id of all triangles with a slope below the specified value to RC_WALKABLE_AREA.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | walkableSlopeAngle | The maximum slope that is considered walkable. [Limits: 0 <= value < 90] [Units: Degrees] |
| [in] | verts | The vertices. [(x, y, z) * nv] |
| [in] | nv | The number of vertices. |
| [in] | tris | The triangle vertex indices. [(vertA, vertB, vertC) * nt] |
| [in] | nt | The number of triangles. |
| [out] | areas | The triangle area ids. [Length: >= nt] |
Only sets the area id's for the walkable triangles. Does not alter the area id's for unwalkable triangles.
See the rcConfig documentation for more information on the configuration parameters.
Here is the call graph for this function:
|
inline |
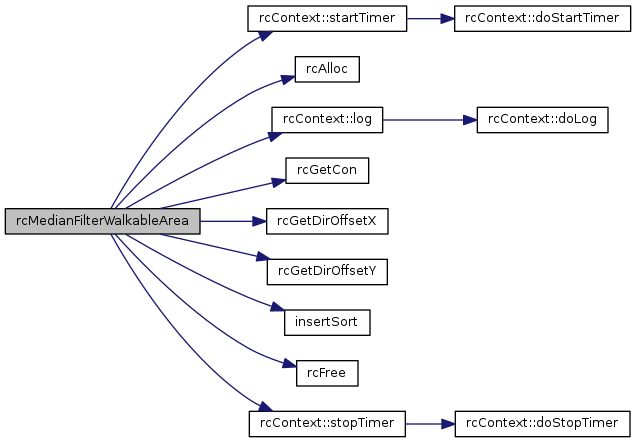
| bool rcMedianFilterWalkableArea | ( | rcContext * | ctx, |
| rcCompactHeightfield & | chf | ||
| ) |
Applies a median filter to walkable area types (based on area id), removing noise.
| [in,out] | ctx | The build context to use during the operation. |
| [in,out] | chf | A populated compact heightfield. |
This filter is usually applied after applying area id's using functions such as rcMarkBoxArea, rcMarkConvexPolyArea, and rcMarkCylinderArea.
Here is the call graph for this function:| bool rcMergePolyMeshDetails | ( | rcContext * | ctx, |
| rcPolyMeshDetail ** | meshes, | ||
| const int | nmeshes, | ||
| rcPolyMeshDetail & | mesh | ||
| ) |
Merges multiple detail meshes into a single detail mesh.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | meshes | An array of detail meshes to merge. [Size: nmeshes] |
| [in] | nmeshes | The number of detail meshes in the meshes array. |
| [out] | mesh | The resulting detail mesh. (Must be pre-allocated.) |
Here is the call graph for this function: Here is the caller graph for this function:| bool rcMergePolyMeshes | ( | rcContext * | ctx, |
| rcPolyMesh ** | meshes, | ||
| const int | nmeshes, | ||
| rcPolyMesh & | mesh | ||
| ) |
Merges multiple polygon meshes into a single mesh.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | meshes | An array of polygon meshes to merge. [Size: nmeshes] |
| [in] | nmeshes | The number of polygon meshes in the meshes array. |
| [in] | mesh | The resulting polygon mesh. (Must be pre-allocated.) |
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
| int rcOffsetPoly | ( | const float * | verts, |
| const int | nverts, | ||
| const float | offset, | ||
| float * | outVerts, | ||
| const int | maxOutVerts | ||
| ) |
Helper function to offset voncex polygons for rcMarkConvexPolyArea.
| [in] | verts | The vertices of the polygon [Form: (x, y, z) * nverts] |
| [in] | nverts | The number of vertices in the polygon. |
| [out] | outVerts | The offset vertices (should hold up to 2 * nverts) [Form: (x, y, z) * return value] |
| [in] | maxOutVerts | The max number of vertices that can be stored to outVerts. |
outVerts. Here is the call graph for this function:| void rcRasterizeTriangle | ( | rcContext * | ctx, |
| const float * | v0, | ||
| const float * | v1, | ||
| const float * | v2, | ||
| const unsigned char | area, | ||
| rcHeightfield & | solid, | ||
| const int | flagMergeThr | ||
| ) |
Rasterizes a triangle into the specified heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | v0 | Triangle vertex 0 [(x, y, z)] |
| [in] | v1 | Triangle vertex 1 [(x, y, z)] |
| [in] | v2 | Triangle vertex 2 [(x, y, z)] |
| [in] | area | The area id of the triangle. [Limit: <= RC_WALKABLE_AREA] |
| [in,out] | solid | An initialized heightfield. |
| [in] | flagMergeThr | The distance where the walkable flag is favored over the non-walkable flag. [Limit: >= 0] [Units: vx] |
No spans will be added if the triangle does not overlap the heightfield grid.
Here is the call graph for this function:| void rcRasterizeTriangles | ( | rcContext * | ctx, |
| const float * | verts, | ||
| const int | , | ||
| const int * | tris, | ||
| const unsigned char * | areas, | ||
| const int | nt, | ||
| rcHeightfield & | solid, | ||
| const int | flagMergeThr | ||
| ) |
Rasterizes an indexed triangle mesh into the specified heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | verts | The vertices. [(x, y, z) * nv] |
| [in] | nv | The number of vertices. |
| [in] | tris | The triangle indices. [(vertA, vertB, vertC) * nt] |
| [in] | areas | The area id's of the triangles. [Limit: <= RC_WALKABLE_AREA] [Size: nt] |
| [in] | nt | The number of triangles. |
| [in,out] | solid | An initialized heightfield. |
| [in] | flagMergeThr | The distance where the walkable flag is favored over the non-walkable flag. [Limit: >= 0] [Units: vx] |
Spans will only be added for triangles that overlap the heightfield grid.
Here is the call graph for this function: Here is the caller graph for this function:| void rcRasterizeTriangles | ( | rcContext * | ctx, |
| const float * | verts, | ||
| const int | , | ||
| const unsigned short * | tris, | ||
| const unsigned char * | areas, | ||
| const int | nt, | ||
| rcHeightfield & | solid, | ||
| const int | flagMergeThr | ||
| ) |
Rasterizes an indexed triangle mesh into the specified heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | verts | The vertices. [(x, y, z) * nv] |
| [in] | nv | The number of vertices. |
| [in] | tris | The triangle indices. [(vertA, vertB, vertC) * nt] |
| [in] | areas | The area id's of the triangles. [Limit: <= RC_WALKABLE_AREA] [Size: nt] |
| [in] | nt | The number of triangles. |
| [in,out] | solid | An initialized heightfield. |
| [in] | flagMergeThr | The distance where the walkable flag is favored over the non-walkable flag. [Limit: >= 0] [Units: vx] |
Spans will only be added for triangles that overlap the heightfield grid.
Here is the call graph for this function:| void rcRasterizeTriangles | ( | rcContext * | ctx, |
| const float * | verts, | ||
| const unsigned char * | areas, | ||
| const int | nt, | ||
| rcHeightfield & | solid, | ||
| const int | flagMergeThr | ||
| ) |
Rasterizes triangles into the specified heightfield.
| [in,out] | ctx | The build context to use during the operation. |
| [in] | verts | The triangle vertices. [(ax, ay, az, bx, by, bz, cx, by, cx) * nt] |
| [in] | areas | The area id's of the triangles. [Limit: <= RC_WALKABLE_AREA] [Size: nt] |
| [in] | nt | The number of triangles. |
| [in,out] | solid | An initialized heightfield. |
| [in] | flagMergeThr | The distance where the walkable flag is favored over the non-walkable flag. [Limit: >= 0] [Units: vx] |
Spans will only be added for triangles that overlap the heightfield grid.
Here is the call graph for this function:
|
inline |
Sets the neighbor connection data for the specified direction.
| [in] | s | The span to update. |
| [in] | dir | The direction to set. [Limits: 0 <= value < 4] |
| [in] | i | The index of the neighbor span. |
Here is the caller graph for this function:
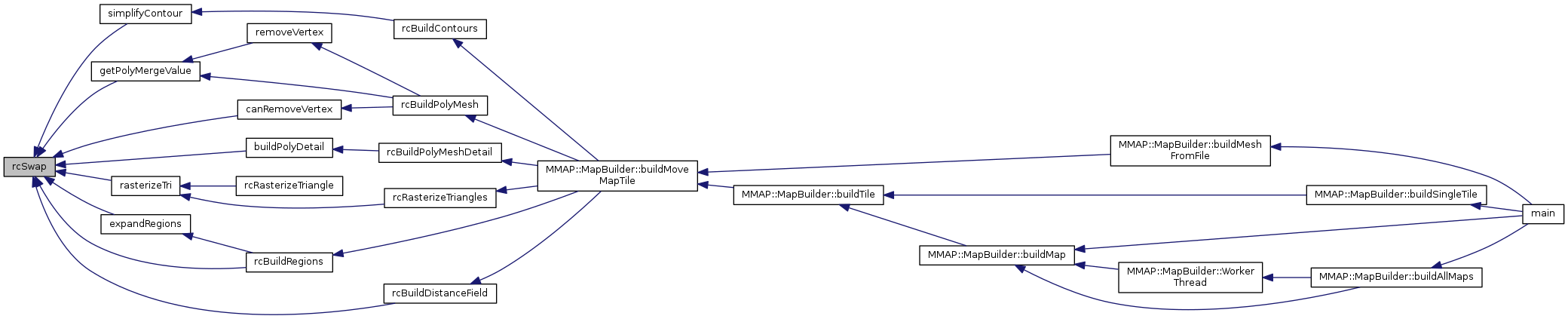
|
inline |
| float rcSqrt | ( | float | x | ) |
|
inline |
Performs a vector addition. (v1 + v2)
| [out] | dest | The result vector. [(x, y, z)] |
| [in] | v1 | The base vector. [(x, y, z)] |
| [in] | v2 | The vector to add to v1. [(x, y, z)] |
Here is the caller graph for this function:
|
inline |
Derives the cross product of two vectors. (v1 x v2)
| [out] | dest | The cross product. [(x, y, z)] |
| [in] | v1 | A Vector [(x, y, z)] |
| [in] | v2 | A vector [(x, y, z)] |
Here is the caller graph for this function:Returns the distance between two points.
| [in] | v1 | A point. [(x, y, z)] |
| [in] | v2 | A point. [(x, y, z)] |
Here is the call graph for this function:Returns the square of the distance between two points.
| [in] | v1 | A point. [(x, y, z)] |
| [in] | v2 | A point. [(x, y, z)] |
Performs a scaled vector addition. (v1 + (v2 * s))
| [out] | dest | The result vector. [(x, y, z)] |
| [in] | v1 | The base vector. [(x, y, z)] |
| [in] | v2 | The vector to scale and add to v1. [(x, y, z)] |
| [in] | s | The amount to scale v2 by before adding to v1. |
|
inline |
Selects the maximum value of each element from the specified vectors.
| [in,out] | mx | A vector. (Will be updated with the result.) [(x, y, z)] |
| [in] | v | A vector. [(x, y, z)] |
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Selects the minimum value of each element from the specified vectors.
| [in,out] | mn | A vector. (Will be updated with the result.) [(x, y, z)] |
| [in] | v | A vector. [(x, y, z)] |
Here is the call graph for this function: Here is the caller graph for this function:
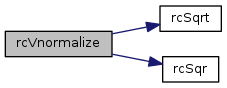
|
inline |
Normalizes the vector.
| [in,out] | v | The vector to normalize. [(x, y, z)] |
Here is the call graph for this function: Here is the caller graph for this function:Performs a vector subtraction. (v1 - v2)
| [out] | dest | The result vector. [(x, y, z)] |
| [in] | v1 | The base vector. [(x, y, z)] |
| [in] | v2 | The vector to subtract from v1. [(x, y, z)] |
Here is the caller graph for this function:
|
static |
Area border flag. If a region ID has this bit set, then the associated element lies on the border of an area. (Used during the region and contour build process.)
|
static |
Heighfield border flag. If a heightfield region ID has this bit set, then the region is a border region and its spans are considered unwalkable. (Used during the region and contour build process.)
|
static |
Border vertex flag. If a region ID has this bit set, then the associated element lies on a tile border. If a contour vertex's region ID has this bit set, the vertex will later be removed in order to match the segments and vertices at tile boundaries. (Used during the build process.)
|
static |
Applied to the region id field of contour vertices in order to extract the region id. The region id field of a vertex may have several flags applied to it. So the fields value can't be used directly.
|
static |
An value which indicates an invalid index within a mesh.
|
static |
The value returned by rcGetCon if the specified direction is not connected to another span. (Has no neighbor.)
|
static |
Represents the null area. When a data element is given this value it is considered to no longer be assigned to a usable area. (E.g. It is unwalkable.)
|
static |
The value of PI used by Recast.
|
static |
Defines the number of bits allocated to rcSpan::smin and rcSpan::smax.
|
static |
Defines the maximum value for rcSpan::smin and rcSpan::smax.
|
static |
The number of spans allocated per span spool.
|
static |
The default area id used to indicate a walkable polygon. This is also the maximum allowed area id, and the only non-null area id recognized by some steps in the build process.
 1.8.8
1.8.8