|
TrinityCore
|
|
TrinityCore
|
#include <Capsule.h>
Public Member Functions | |
| Capsule () | |
| Capsule (class BinaryInput &b) | |
| Capsule (const Vector3 &_p1, const Vector3 &_p2, float _r) | |
| void | serialize (class BinaryOutput &b) const |
| void | deserialize (class BinaryInput &b) |
| Line | axis () const |
| float | radius () const |
| Vector3 | point (int i) const |
| float | height () const |
| Vector3 | center () const |
| void | getReferenceFrame (class CoordinateFrame &cframe) const |
| bool | contains (const Vector3 &p) const |
| float | volume () const |
| float | area () const |
| void | getBounds (AABox &out) const |
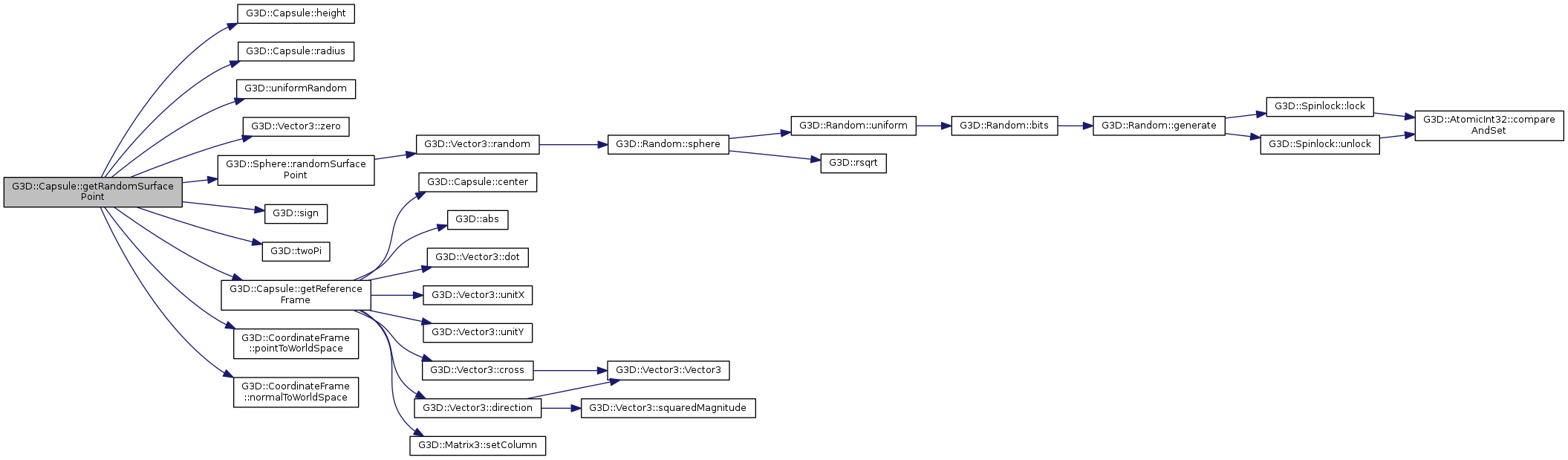
| void | getRandomSurfacePoint (Vector3 &P, Vector3 &N) const |
| Vector3 | randomInteriorPoint () const |
Private Attributes | |
| Vector3 | p1 |
| Vector3 | p2 |
| float | _radius |
A shape formed by extruding a sphere along a line segment.
| G3D::Capsule::Capsule | ( | class BinaryInput & | b | ) |
 Here is the call graph for this function:
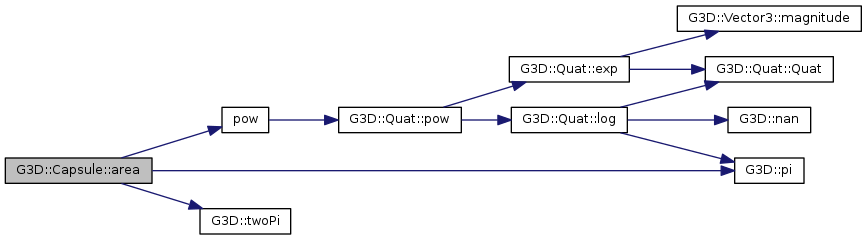
Here is the call graph for this function:| float G3D::Capsule::area | ( | ) | const |
Here is the call graph for this function:| Line G3D::Capsule::axis | ( | ) | const |
The line down the center of the capsule
Here is the call graph for this function:
|
inline |
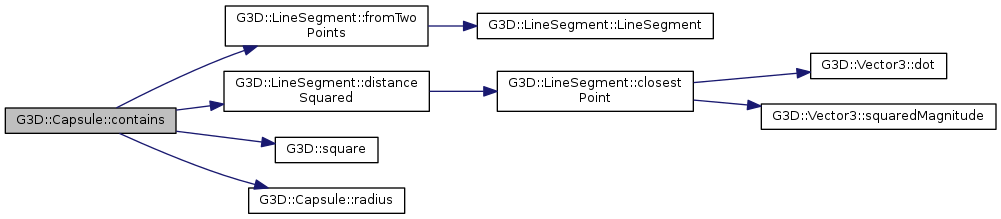
Here is the caller graph for this function:Returns true if the point is inside the capsule or on its surface.
Here is the call graph for this function:| void G3D::Capsule::deserialize | ( | class BinaryInput & | b | ) |
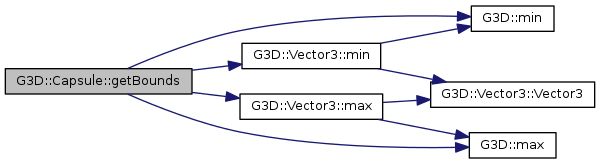
Here is the call graph for this function: Here is the caller graph for this function:| void G3D::Capsule::getBounds | ( | AABox & | out | ) | const |
Get axis aligned bounding box
Here is the call graph for this function:Random world space point with outward facing normal.
Here is the call graph for this function:| void G3D::Capsule::getReferenceFrame | ( | class CoordinateFrame & | cframe | ) | const |
Get a reference frame in which the center of mass is the origin and Y is the axis of the capsule.
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Distance between the sphere centers. The total extent of the cylinder is 2r + h.
Here is the caller graph for this function:
|
inline |
Argument may be 0 or 1
Here is the caller graph for this function:
|
inline |
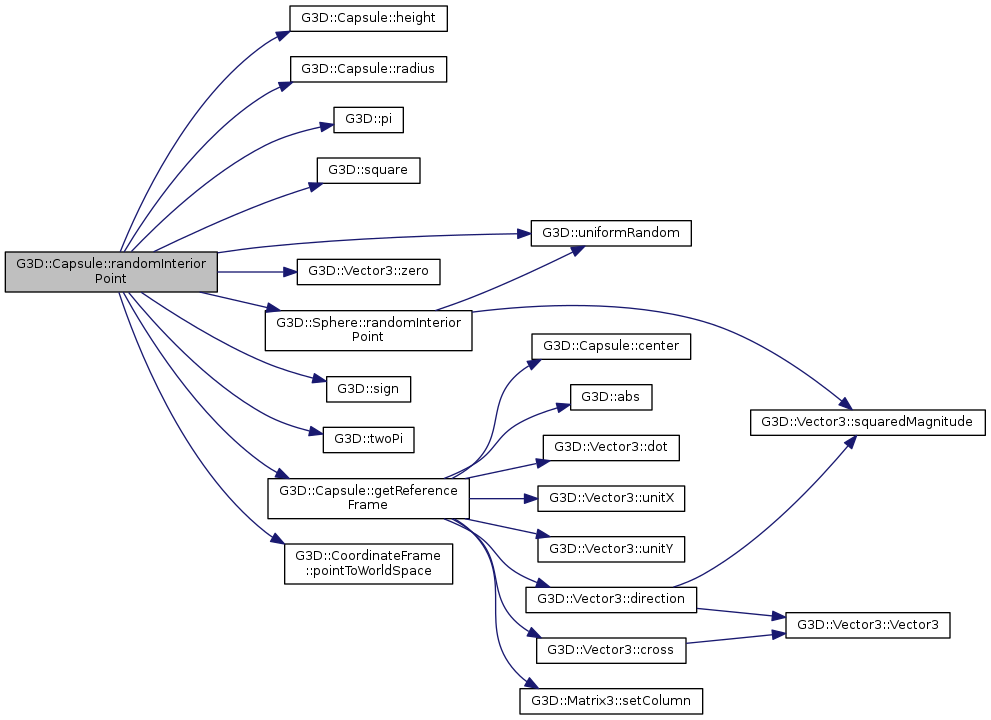
Here is the caller graph for this function:| Vector3 G3D::Capsule::randomInteriorPoint | ( | ) | const |
Point selected uniformly at random over the volume.
Here is the call graph for this function:| void G3D::Capsule::serialize | ( | class BinaryOutput & | b | ) | const |
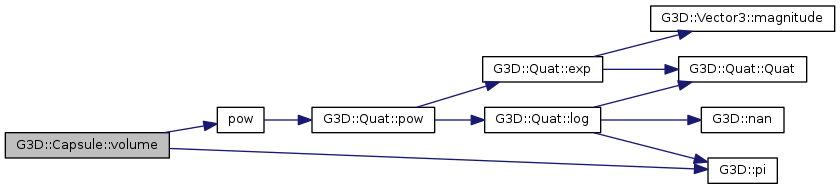
Here is the call graph for this function:| float G3D::Capsule::volume | ( | ) | const |
Here is the call graph for this function:
|
private |
|
private |
|
private |
 1.8.8
1.8.8