|
Eigen
3.2.7
|


|
|
Eigen
3.2.7
|
|
Sequence of Householder reflections acting on subspaces with decreasing size.
This is defined in the Householder module.
| VectorsType | type of matrix containing the Householder vectors |
| CoeffsType | type of vector containing the Householder coefficients |
| Side | either OnTheLeft (the default) or OnTheRight |
This class represents a product sequence of Householder reflections where the first Householder reflection acts on the whole space, the second Householder reflection leaves the one-dimensional subspace spanned by the first unit vector invariant, the third Householder reflection leaves the two-dimensional subspace spanned by the first two unit vectors invariant, and so on up to the last reflection which leaves all but one dimensions invariant and acts only on the last dimension. Such sequences of Householder reflections are used in several algorithms to zero out certain parts of a matrix. Indeed, the methods HessenbergDecomposition::matrixQ(), Tridiagonalization::matrixQ(), HouseholderQR::householderQ(), and ColPivHouseholderQR::householderQ() all return a HouseholderSequence.
More precisely, the class HouseholderSequence represents an  matrix
matrix  of the form
of the form  where the i-th Householder reflection is
where the i-th Householder reflection is  . The i-th Householder coefficient
. The i-th Householder coefficient  is a scalar and the i-th Householder vector
is a scalar and the i-th Householder vector  is a vector of the form
is a vector of the form
![\[ v_i = [\underbrace{0, \ldots, 0}_{i-1\mbox{ zeros}}, 1, \underbrace{*, \ldots,*}_{n-i\mbox{ arbitrary entries}} ]. \]](form_135.png)
The last  entries of are called the essential part of the Householder vector.
entries of are called the essential part of the Householder vector.
Typical usages are listed below, where H is a HouseholderSequence:
In addition to the adjoint, you can also apply the inverse (=adjoint), the transpose, and the conjugate operators.
See the documentation for HouseholderSequence(const VectorsType&, const CoeffsType&) for an example.
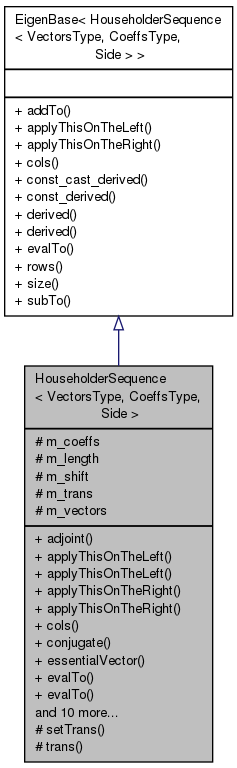
 Inheritance diagram for HouseholderSequence< VectorsType, CoeffsType, Side >:
Inheritance diagram for HouseholderSequence< VectorsType, CoeffsType, Side >:Public Member Functions | |
| ConjugateReturnType | adjoint () const |
| Adjoint (conjugate transpose) of the Householder sequence. | |
| Index | cols () const |
| Number of columns of transformation viewed as a matrix. More... | |
| ConjugateReturnType | conjugate () const |
| Complex conjugate of the Householder sequence. | |
| HouseholderSequence < VectorsType, CoeffsType, Side > & | derived () |
| const HouseholderSequence < VectorsType, CoeffsType, Side > & | derived () const |
| const EssentialVectorType | essentialVector (Index k) const |
| Essential part of a Householder vector. More... | |
| HouseholderSequence (const VectorsType &v, const CoeffsType &h) | |
| Constructor. More... | |
| HouseholderSequence (const HouseholderSequence &other) | |
| Copy constructor. | |
| ConjugateReturnType | inverse () const |
| Inverse of the Householder sequence (equals the adjoint). | |
| Index | length () const |
| Returns the length of the Householder sequence. | |
| template<typename OtherDerived > | |
| internal::matrix_type_times_scalar_type < Scalar, OtherDerived >::Type | operator* (const MatrixBase< OtherDerived > &other) const |
| Computes the product of a Householder sequence with a matrix. More... | |
| Index | rows () const |
| Number of rows of transformation viewed as a matrix. More... | |
| HouseholderSequence & | setLength (Index length) |
| Sets the length of the Householder sequence. More... | |
| HouseholderSequence & | setShift (Index shift) |
| Sets the shift of the Householder sequence. More... | |
| Index | shift () const |
| Returns the shift of the Householder sequence. | |
| Index | size () const |
| HouseholderSequence | transpose () const |
| Transpose of the Householder sequence. | |
Protected Member Functions | |
| HouseholderSequence & | setTrans (bool trans) |
| Sets the transpose flag. More... | |
| bool | trans () const |
| Returns the transpose flag. | |
|
inline |
Constructor.
| [in] | v | Matrix containing the essential parts of the Householder vectors |
| [in] | h | Vector containing the Householder coefficients |
Constructs the Householder sequence with coefficients given by h and vectors given by v. The i-th Householder coefficient is given by h(i) and the essential part of the i-th Householder vector is given by v(k,i) with k > i (the subdiagonal part of the i-th column). If v has fewer columns than rows, then the Householder sequence contains as many Householder reflections as there are columns.
v and h by reference.Example:
Output:
The matrix v is:
0.68 0.597 -0.33
-0.211 0.823 0.536
0.566 -0.605 -0.444
The first Householder vector is: v_0 = 1 -0.211 0.566
The second Householder vector is: v_1 = 0 1 -0.605
The third Householder vector is: v_2 = 0 0 1
The Householder coefficients are: h = 0.108 -0.0452 0.258
The first Householder reflection is represented by H_0 =
0.892 0.0228 -0.0611
0.0228 0.995 0.0129
-0.0611 0.0129 0.965
The second Householder reflection is represented by H_1 =
1 0 0
0 1.05 -0.0273
0 -0.0273 1.02
The third Householder reflection is represented by H_2 =
1 0 0
0 1 0
0 0 0.742
Their product is H_0 H_1 H_2 =
0.892 0.0255 -0.0466
0.0228 1.04 -0.0105
-0.0611 -0.0129 0.728
If we construct a HouseholderSequence from v and h
and convert it to a matrix, we get:
0.892 0.0255 -0.0466
0.0228 1.04 -0.0105
-0.0611 -0.0129 0.728
|
inline |
Number of columns of transformation viewed as a matrix.
This equals the dimension of the space that the transformation acts on.
References HouseholderSequence< VectorsType, CoeffsType, Side >::rows().
|
inlineinherited |
|
inlineinherited |
|
inline |
Essential part of a Householder vector.
| [in] | k | Index of Householder reflection |
This function returns the essential part of the Householder vector . This is a vector of length containing the last entries of the vector
The index  equals
equals k + shift(), corresponding to the k-th column of the matrix v passed to the constructor.
|
inline |
Computes the product of a Householder sequence with a matrix.
| [in] | other | Matrix being multiplied. |
This function computes  where is the Householder sequence represented by
where is the Householder sequence represented by *this and  is the matrix
is the matrix other.
|
inline |
Number of rows of transformation viewed as a matrix.
This equals the dimension of the space that the transformation acts on.
References Eigen::OnTheLeft.
Referenced by HouseholderSequence< VectorsType, CoeffsType, Side >::cols().
|
inline |
Sets the length of the Householder sequence.
| [in] | length | New value for the length. |
By default, the length  of the Householder sequence
of the Householder sequence  is set to the number of columns of the matrix
is set to the number of columns of the matrix v passed to the constructor, or the number of rows if that is smaller. After this function is called, the length equals length.
References HouseholderSequence< VectorsType, CoeffsType, Side >::length().
Referenced by HouseholderSequence< VectorsType, CoeffsType, Side >::conjugate().
|
inline |
Sets the shift of the Householder sequence.
| [in] | shift | New value for the shift. |
By default, a HouseholderSequence object represents and the i-th column of the matrix v passed to the constructor corresponds to the i-th Householder reflection. After this function is called, the object represents  and the i-th column of
and the i-th column of v corresponds to the (shift+i)-th Householder reflection.
References HouseholderSequence< VectorsType, CoeffsType, Side >::shift().
Referenced by HouseholderSequence< VectorsType, CoeffsType, Side >::conjugate().
|
inlineprotected |
Sets the transpose flag.
| [in] | trans | New value of the transpose flag. |
By default, the transpose flag is not set. If the transpose flag is set, then this object represents  instead of .
instead of .
References HouseholderSequence< VectorsType, CoeffsType, Side >::trans().
Referenced by HouseholderSequence< VectorsType, CoeffsType, Side >::adjoint(), HouseholderSequence< VectorsType, CoeffsType, Side >::conjugate(), and HouseholderSequence< VectorsType, CoeffsType, Side >::transpose().
|
inlineinherited |
 1.8.5
1.8.5