Hinge Joint 2D
The Hinge Joint 2D component allows a Sprite object controlled by rigidbody physics to be attached to a point in space around which it can rotate. The rotation can be left to happen passively (in response to a collision, say) or actively powered by a motor torque provided by the joint itself. The hinge can also be set up with limits to prevent it from making a full rotation.
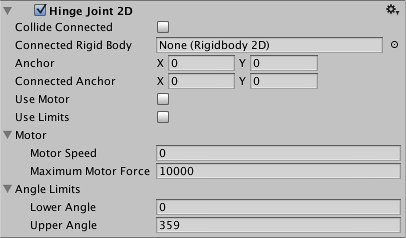
| Collide Connected | Can the two connected objects collide with each other? |
| Connected Rigidbody | The other Rigidbody2D object that the one with the joint is connected to. If this is null then the othen end of the joint will be fixed at a point in space. |
| Anchor | Coordinate in local space where the end point of the joint is attached. |
| Connected Anchor | Coordinate in the other object's local space where its end of the joint is attached. |
| Use Motor | Should the hinge motor be enabled? |
| Use Limits | Should the rotation angle be limited? |
| Motor Speed | Target motor speed (degrees/sec). |
| Maximum Motor Force | The maximum torque the motor can apply while attempting to reach the target speed. |
| Lower Angle | The lower end of the rotation arc allowed by the limit. |
| Upper Angle | The upper end of the rotation arc allowed by the limit. |
Details
The hinge joint's name implies something like a door hinge (and it can certainly be used to implement that) but it refers more generally to anything that rotates around a particular point. It can be used for machine parts, powered wheels, pendulums and many other similar things.
Page last updated: 2013-08-16