|
TrinityCore
|
|
TrinityCore
|
Classes | |
| struct | AreaInfo |
| class | AreaInfoCallback |
| struct | GModelRayCallback |
| class | GroupModel |
| struct | GroupModel_Raw |
| class | IntersectionCallBack |
| class | IVMapManager |
| struct | LocationInfo |
| class | LocationInfoCallback |
| class | ManagedModel |
| class | MapRayCallback |
| struct | MapSpawns |
| class | MeshTriangle |
| class | ModelInstance |
| class | ModelPosition |
| class | ModelSpawn |
| class | MyCollisionDetection |
| class | StaticMapTree |
| class | TileAssembler |
| class | TriBoundFunc |
| class | VMapFactory |
| class | VMapManager2 |
| class | WModelAreaCallback |
| struct | WModelRayCallBack |
| class | WmoLiquid |
| struct | WMOLiquidHeader |
| class | WorldModel |
| struct | WorldModel_Raw |
Typedefs | |
| typedef std::unordered_map < uint32, StaticMapTree * > | InstanceTreeMap |
| typedef std::unordered_map < std::string, ManagedModel > | ModelFileMap |
| typedef std::map< uint32, ModelSpawn > | UniqueEntryMap |
| typedef std::multimap< uint32, uint32 > | TileMap |
| typedef std::map< uint32, MapSpawns * > | MapData |
Enumerations | |
| enum | VMAP_LOAD_RESULT { VMAP_LOAD_RESULT_ERROR, VMAP_LOAD_RESULT_OK, VMAP_LOAD_RESULT_IGNORED } |
| enum | DisableTypes { VMAP_DISABLE_AREAFLAG = 0x1, VMAP_DISABLE_HEIGHT = 0x2, VMAP_DISABLE_LOS = 0x4, VMAP_DISABLE_LIQUIDSTATUS = 0x8 } |
| enum | ModelFlags { MOD_M2 = 1, MOD_WORLDSPAWN = 1<<1, MOD_HAS_BOUND = 1<<2 } |
Functions | |
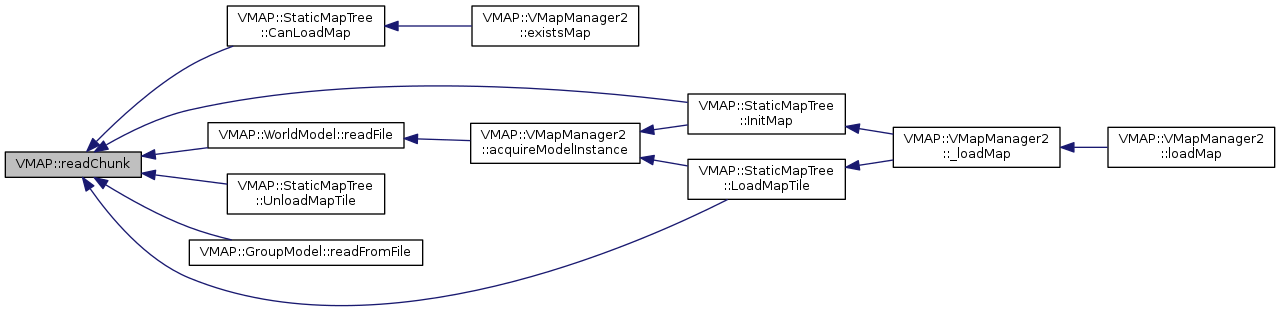
| bool | readChunk (FILE *rf, char *dest, const char *compare, uint32 len) |
| bool | IntersectTriangle (const MeshTriangle &tri, std::vector< Vector3 >::const_iterator points, const G3D::Ray &ray, float &distance) |
Variables | |
| IVMapManager * | gVMapManager = NULL |
| const char | VMAP_MAGIC [] = "VMAP_4.3" |
| const char | RAW_VMAP_MAGIC [] = "VMAP043" |
| const char | GAMEOBJECT_MODELS [] = "GameObjectModels.dtree" |
This is the minimum interface to the VMapMamager.
This is the access point to the VMapManager.
The Class is mainly taken from G3D/AABSPTree.h but modified to be able to use our internal data structure. This is an iterator that helps us analysing the BSP-Trees. The collision detection is modified to return true, if we are inside an object.
| typedef std::unordered_map<uint32, StaticMapTree*> VMAP::InstanceTreeMap |
| typedef std::map<uint32, MapSpawns*> VMAP::MapData |
| typedef std::unordered_map<std::string, ManagedModel> VMAP::ModelFileMap |
| typedef std::multimap<uint32, uint32> VMAP::TileMap |
| typedef std::map<uint32, ModelSpawn> VMAP::UniqueEntryMap |
| enum VMAP::DisableTypes |
| enum VMAP::ModelFlags |
| bool VMAP::IntersectTriangle | ( | const MeshTriangle & | tri, |
| std::vector< Vector3 >::const_iterator | points, | ||
| const G3D::Ray & | ray, | ||
| float & | distance | ||
| ) |
 Here is the call graph for this function: Here is the caller graph for this function:
Here is the call graph for this function: Here is the caller graph for this function:| const char VMAP::GAMEOBJECT_MODELS[] = "GameObjectModels.dtree" |
| IVMapManager* VMAP::gVMapManager = NULL |
| const char VMAP::RAW_VMAP_MAGIC[] = "VMAP043" |
| const char VMAP::VMAP_MAGIC[] = "VMAP_4.3" |
 1.8.8
1.8.8