#include <DynamicTree.h>
|
| | DynamicMapTree () |
| |
| | ~DynamicMapTree () |
| |
| bool | isInLineOfSight (float x1, float y1, float z1, float x2, float y2, float z2, uint32 phasemask) const |
| |
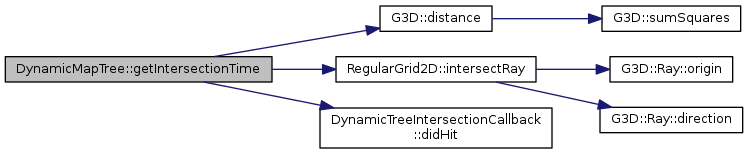
| bool | getIntersectionTime (uint32 phasemask, const G3D::Ray &ray, const G3D::Vector3 &endPos, float &maxDist) const |
| |
| bool | getObjectHitPos (uint32 phasemask, const G3D::Vector3 &pPos1, const G3D::Vector3 &pPos2, G3D::Vector3 &pResultHitPos, float pModifyDist) const |
| |
| float | getHeight (float x, float y, float z, float maxSearchDist, uint32 phasemask) const |
| |
| void | insert (const GameObjectModel &) |
| |
| void | remove (const GameObjectModel &) |
| |
| bool | contains (const GameObjectModel &) const |
| |
| int | size () const |
| |
| void | balance () |
| |
| void | update (uint32 diff) |
| |
| DynamicMapTree::DynamicMapTree |
( |
| ) |
|
DynTreeImpl * impl
Definition: DynamicTree.h:36
Definition: DynamicTree.cpp:63
| DynamicMapTree::~DynamicMapTree |
( |
| ) |
|
DynTreeImpl * impl
Definition: DynamicTree.h:36
| void DynamicMapTree::balance |
( |
| ) |
|
void balance()
Definition: DynamicTree.cpp:86
DynTreeImpl * impl
Definition: DynamicTree.h:36
DynTreeImpl * impl
Definition: DynamicTree.h:36
bool contains(const T &value) const
Definition: RegularGrid.h:73
| float DynamicMapTree::getHeight |
( |
float |
x, |
|
|
float |
y, |
|
|
float |
z, |
|
|
float |
maxSearchDist, |
|
|
uint32 |
phasemask |
|
) |
| const |
256 if (callback.didHit())
257 return v.z - maxSearchDist;
float finf()
Definition: g3dmath.cpp:71
DynTreeImpl * impl
Definition: DynamicTree.h:36
G3D::int16 z
Definition: Vector3int16.h:46
G3D::int16 y
Definition: Vector2int16.h:38
Definition: DynamicTree.cpp:147
void intersectZAllignedRay(const G3D::Ray &ray, RayCallback &intersectCallback, float &max_dist)
Definition: RegularGrid.h:199
G3D::int16 x
Definition: Vector2int16.h:37
188 if (callback.didHit())
190 return callback.didHit();
DynTreeImpl * impl
Definition: DynamicTree.h:36
void intersectRay(const G3D::Ray &ray, RayCallback &intersectCallback, float max_dist)
Definition: RegularGrid.h:106
double distance(double x, double y)
Definition: g3dmath.h:731
Definition: DynamicTree.cpp:147
198 float maxDist = (endPos - startPos).magnitude();
202 if (maxDist < 1e-10f)
209 float dist = maxDist;
212 resultHit = startPos + dir * dist;
215 if ((resultHit - startPos).magnitude() > -modifyDist)
216 resultHit = resultHit + dir*modifyDist;
218 resultHit = startPos;
221 resultHit = resultHit + dir*modifyDist;
T max(const T &x, const T &y)
Definition: g3dmath.h:320
#define ASSERT
Definition: Errors.h:55
bool getIntersectionTime(uint32 phasemask, const G3D::Ray &ray, const G3D::Vector3 &endPos, float &maxDist) const
Definition: DynamicTree.cpp:182
DynTreeImpl * impl
Definition: DynamicTree.h:36
void insert(const Model &mdl)
Definition: DynamicTree.cpp:74
| bool DynamicMapTree::isInLineOfSight |
( |
float |
x1, |
|
|
float |
y1, |
|
|
float |
z1, |
|
|
float |
x2, |
|
|
float |
y2, |
|
|
float |
z2, |
|
|
uint32 |
phasemask |
|
) |
| const |
237 float maxDist = (v2 - v1).magnitude();
246 return !callback.did_hit;
DynTreeImpl * impl
Definition: DynamicTree.h:36
void intersectRay(const G3D::Ray &ray, RayCallback &intersectCallback, float max_dist)
Definition: RegularGrid.h:106
Definition: DynamicTree.cpp:147
bool fuzzyGt(double a, double b)
Definition: g3dmath.h:865
DynTreeImpl * impl
Definition: DynamicTree.h:36
void remove(const Model &mdl)
Definition: DynamicTree.cpp:80
| int DynamicMapTree::size |
( |
| ) |
const |
DynTreeImpl * impl
Definition: DynamicTree.h:36
int size() const
Definition: RegularGrid.h:74
| void DynamicMapTree::update |
( |
uint32 |
diff | ) |
|
DynTreeImpl * impl
Definition: DynamicTree.h:36
void update(uint32 difftime)
Definition: DynamicTree.cpp:92
The documentation for this class was generated from the following files:

 Here is the call graph for this function:
Here is the call graph for this function: 1.8.8
1.8.8